本ドキュメントはMIRS競技会にて「十字路」攻略プログラムについて載せたものである
- 認識
- 動作
- フローチャート DIAファイル
本プログラムはDBで十字路を認識したあと、白線センサで白線を感知したところで十字路と判断する。
メインプログラムからの指令(command)にしたがって、シャーシの向きを変え、白線まで直進し、白線で正体補正、そしてメインプログラムに処理を返す。
白線補正は、白線上で白線センサを使い、DBに対してシャーシが正面を向くように調節する。
標準のmotor.cに改良を加え、十字路独自のモーター制御を実現した。
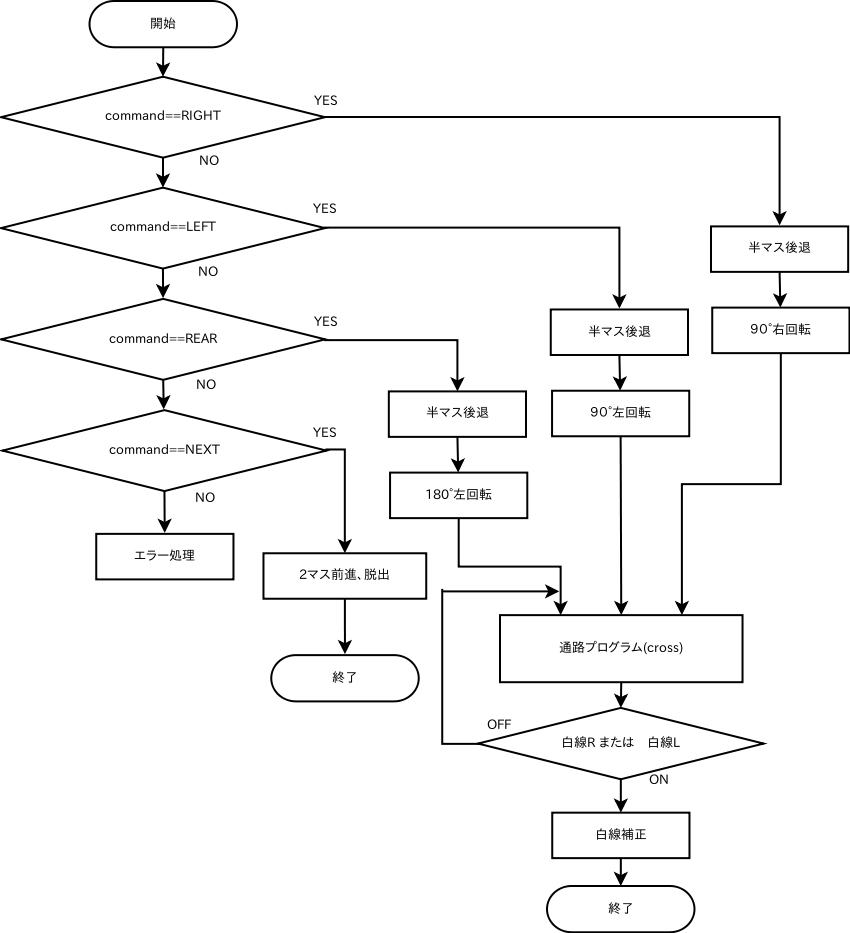
fig1.十字路攻略について
以下に今回作成したプログラムを添付する。
作成したプログラム
関連文書
- MIRSMG3D-FTST-0001---MIRSMG3D 走行制御試験プログラム
- MIRSMG3D-FTST-0002---MIRSMG3D 超音波距離計測試験プログラム
- MIRSMG3D-FTST-0003---MIRSMG3D On/Off I/Oデータ取得試験プログラム
沼津工業高等専門学校 電子制御工学科