- システム概要
- システム詳細
ハードウェア
シャーシの見直し
大車輪による走行
回路のマウントを一か所に纏める
コネクタの外だし、中に出すと危ないぜ★
制御ボードの小型化
ソフトウェア
マルチタスク(阿修羅作戦)による超音波や白線センサなどの同時使用
走行ルートの記憶、(国土地理院作戦)
各仕掛けの攻略プログラム
エラー処理
ハードウェア
シャーシの見直し
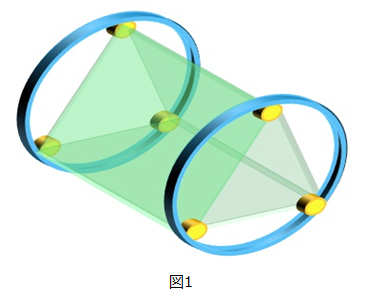
今までのシャーシを使わずマウントの部分を三角形にし、それを直径30cmの塩ビパイプ内に収まるように製作する。詳細は図参照
大車輪による走行
シャーシの頂点にラジコン用(直径5cm)のタイヤを設置し、駆動させ、その駆動を直径30cmの塩ビパイプのタイヤに伝達させ、走行させる。
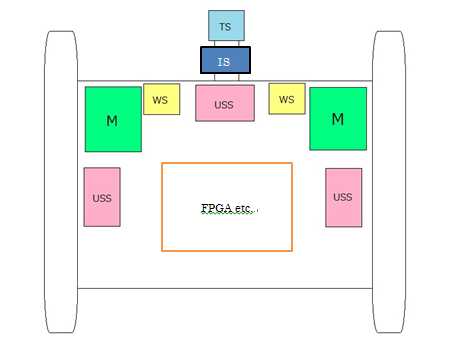
基盤類は一か所に纏められるように、それ専用のマウント部分を作成する、基盤類のコネクト部分は接続しやすいように、マウント部分の外側に拡張する。
センサ類
・超音波センサ…壁の有無を判断する。超音波センサを三つ使用することで十字路や十字路、通路を攻略する。
・白線センサ…白線を合図に他の行動に移る。ゴールを認識する。
・タッチセンサ…行き止まりなどに用いる。
・赤外線センサ…扉の攻略に用いる。
ソフトウェア
マルチタスク
すでにある標準機のプログラムを参考にそれをより良い方向に修正し、マルチタスクによる超音波や白線センサなどの同時使用させる。
走行ルート記憶
走行ルートの記憶はロータリーエンコーダを用いて走行距離を測定しそれを記憶させ、二回目の走行でいかす。
作成するプログラム
各仕掛けの攻略プログラム
・通路通過プログラム
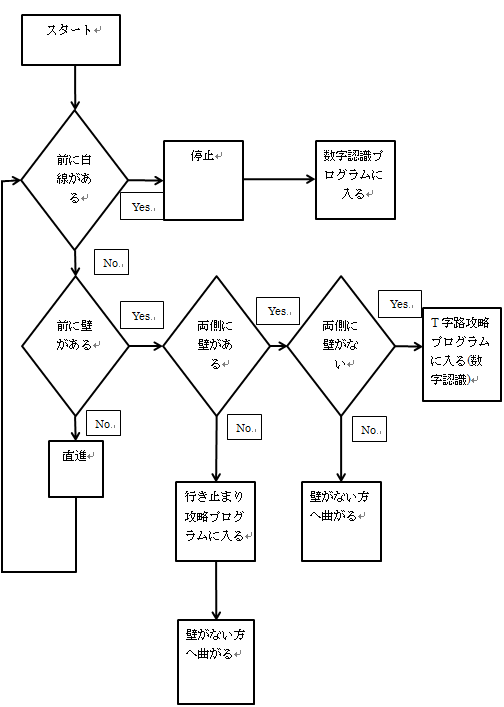
超音波センサを用いて、両側の壁から同じ距離を保つようにする。曲がり角では、以下のフローチャートのような動きをする。
・小部屋
Part.1 超音波を使い壁伝いに進み、正面の壁に当たったら左右の壁をチェックする。壁のない方へ車体を向け、壁伝いに進む。
Part.2テンプレートマッチングを用いる方法
小部屋に入った後、小部屋の中央に移動する。そこでUSBカメラで写真を撮り、あらかじめ用意していた3方向のどれかに通路が空いた写真とテンプレートマッチングを用いて、どの通路が空いているかを確認し、攻略する。
もし、最初の向きで、テンプレートマッチングを用い、通路を発見できなかった場合、回転して、別の方向を向き、テンプレートマッチングを行って攻略する。
・ロータリー
ロータリーに入ったとき、右回りに壁伝いに進み攻略する。
・数字認識
正対補正を行い、ダイレクションボードが真正面になるように停止する。
そのあとの数字認識の方法は、今のところ周辺分布法とテンプレートマッチング法の2つを考えている。
下記のフローチャートは通路を進むときの基本プログラムであり、小部屋やロータリーを判断するプログラムは、今後追加していく。
※プログラムを作成する際に、十字路と小部屋の判別ができるようにする。