目次
1. 本ドキュメントについて2. システム概要
3. 機能・性能
1. 本ドキュメントについて
-
このドキュメントは、MIRS0905のシステムの、基本的な設計を説明するものである。
2. システム概要
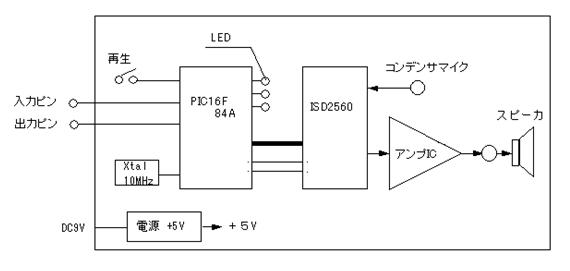
- ワンチップの音声録音再生用LSI「ISD2560を用いる方法」
-
米国Winbond社ISD2560をPIC16F84Aで直接制御して、複数ブロックの音声録音と再生をする。その際、十分の音量でスピーカを駆動する専用のアンプICを追加する。
録音 ・再生はPIC操作で比較的簡単にできるが、ICだけでは動作しないので専用の基盤を 作成する必要がある。
また、サンプリング周波数が8MHzと音質は低い。直流電源5Vで動作し、電池を用いれば十分である。

この技術の実現に関しては、音声再生モジュールおよび増幅回路の設計の他にもCPUから音声を再生する信号を送るために、FPGA内のアドレスデコーダを改良する必要がある。
具体的には、アドレスデコーダで音声再生モジュールを選択するという動作を追加するために、OUTのピンとケース文を変更する。
※アドレスデコーダは、CPUが動作させたいFPGA内のモジュールを選択する際に使用する回路であり、VHDL(VHSIC Hardware Description Language)により記述されている。
音声再生ユニットに関しては次のような回路構成により実現する。
2.1. 動作概要
-
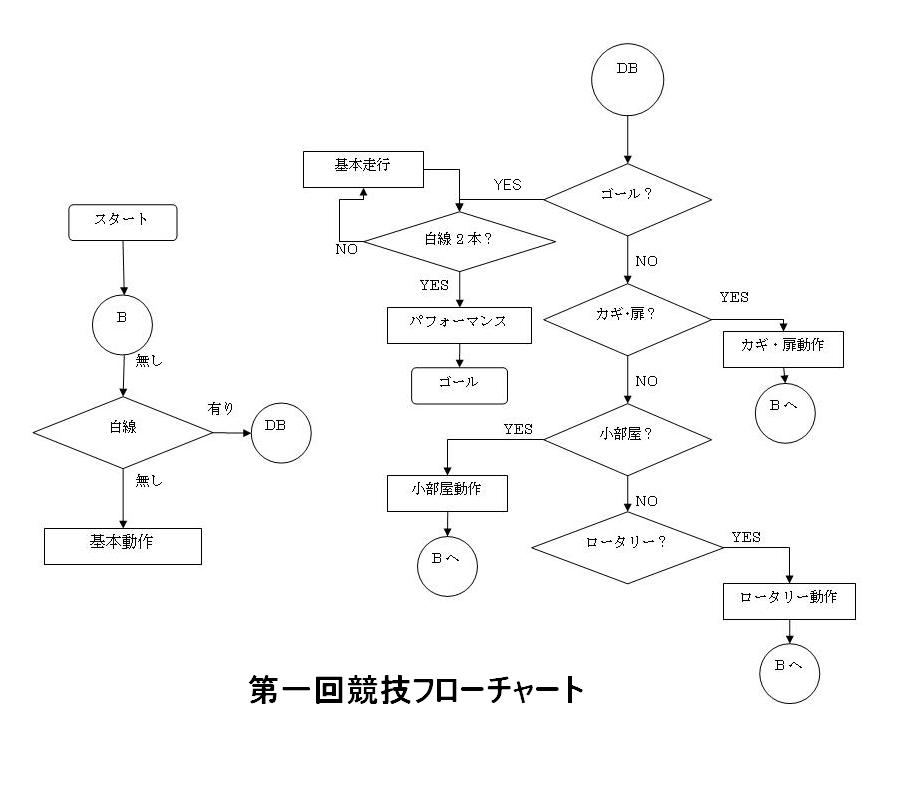
本戦1回目はセンサーによる判断で迷路を攻略する。
この時、Digital Map通称:でじまっぷ)*1によって進路を記憶しておく。
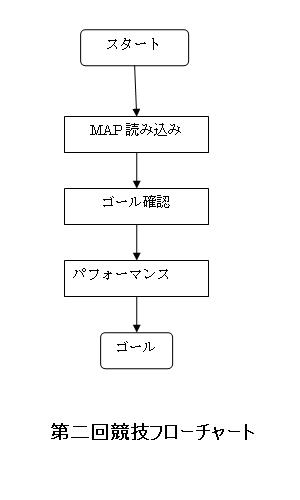
本戦2回目でこのデータを用い、迅速に迷路クリアを目指す。
競技フローチャートを次に示す。
2.2. 障害物対策
2.2.1 小部屋
左右に取り付けられた超音波センサにより、小部屋の侵入を確認した場合、小部屋の真ん中へ進行する。その後、回転しつつ(あるいは[微小角度の回転、壁の有無確認]の繰り返し)超音波センサで壁の有無を確認する。
超音波が返ってこなかった時、そこに壁がないことが分かるので、そこに向かって進行する。
* 壁が無い箇所は2箇所あることに注意する。
2.2.2 ロータリー
小部屋と同じく、超音波センサにより、ロータリーに侵入を確認した場合、時計まわり1/4円弧を描きながら出口を探す。時計まわりに1/4円弧だけ進み、その後壁の有無を確認する。
壁がない(出口を見つけた)場合、その方向へ進行する。
2.2.3 鍵
アームを伸ばして、鍵にタッチする。その後、ターンし扉まで移動する。3. 機能・性能
3.1. メカニクス
3.1.1. キャタピラ
-
キャタピラを搭載することにより、障害物(ステップ、シーソー)を特別な対策を採らずとも突破できることを目指す。
キャタピラはMIRSに合うサイズのラジコン用のパーツ(東京マルイ R/C バトルタンク M1A2 ARBAMS)を受注することにした。
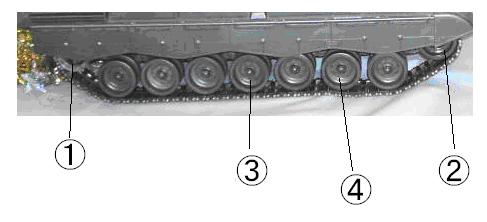
上の図のような形でキャタピラを取り付けたい。 まず、モーターからの動力を前方(①)か後方(②)、または真ん中(③)に繋げるかの問題であるが、使用するキャタピラの材質がゴムであり多少伸縮性があることを考慮して後方(②)にする。
次に、③や④などのキャタピラを支えるホイールについてだが、これはこれからプラモデル屋さんなどに行って見てきてから検討したい。ホイールの大きさなどにもよるが、予定では2つほど取り付ける。この動力ホイールやホイールを回転させるための軸については標準のモーターボックスを加工して取り付け、障害物を乗り越えることも考慮してホイールに弾力性を持たせる。
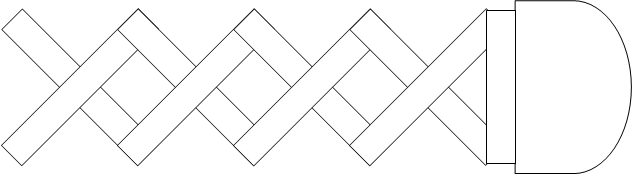
3.1.2. 鍵取得アーム
-
アームにより、鍵の取得と旋回を同時に行い、時間を短縮する。
鍵の部屋に入ったらアームを展開し自機が回転し鍵を獲得する方式。
アームには適当なしなり具合と長さが必要になる。
適当な厚さのプラスチックを購入し、試作してみるが、形として長方形のブレード状のものを検討している。
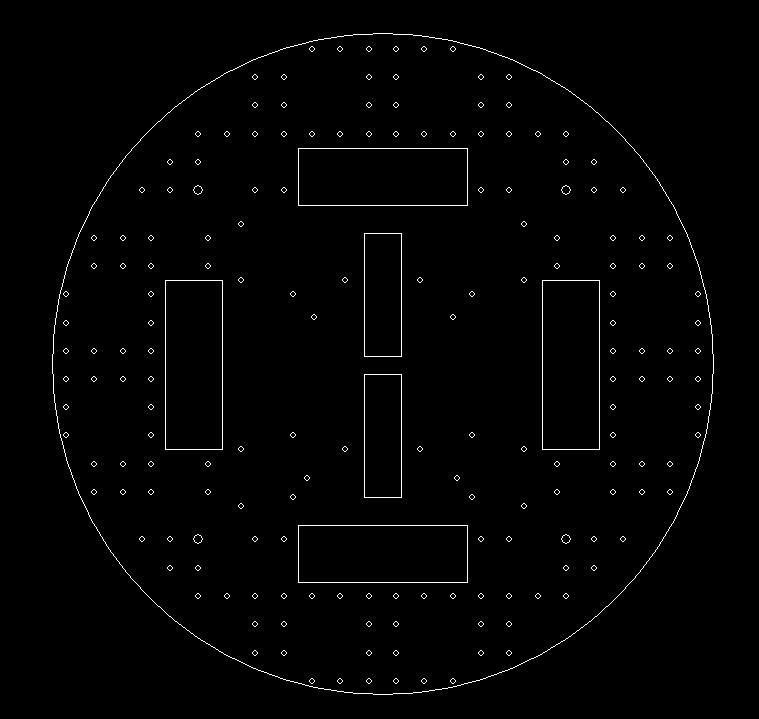
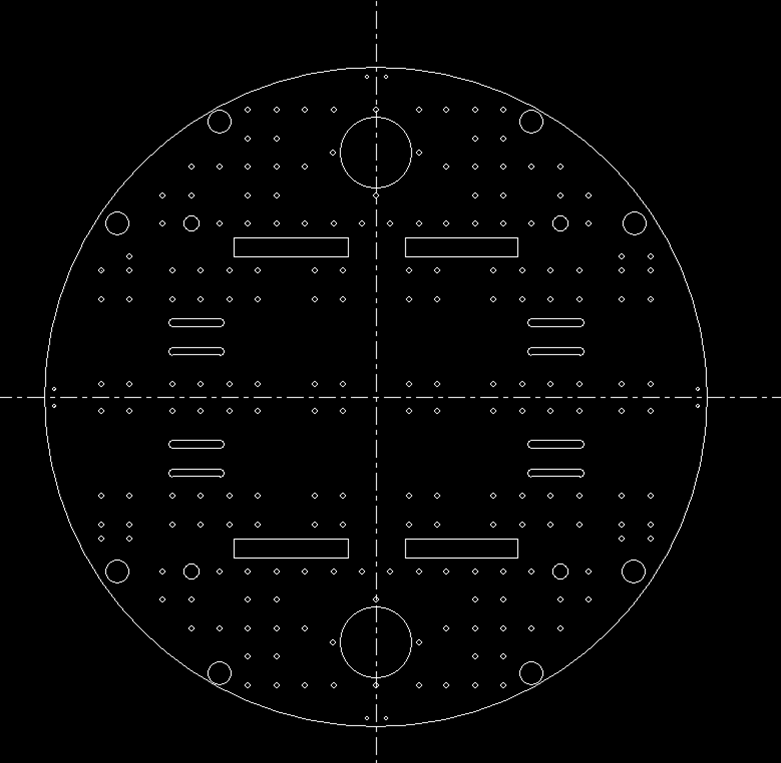
3.1.3. 塩ビ板シャーシ
-
従来のアルミ板シャーシでは自由に加工できないことと、重量が大きいことから、MIRS0905の開発に適さない。
そのため、塩ビ板シャーシにすることで問題を解決し、他班にアドバンテージを作った。
また、形を八角形から円形にすることで、回転中に衝突した際の車体のブレを小さくした。
3.2. エレクトロニクス
3.2.1. スピーカー
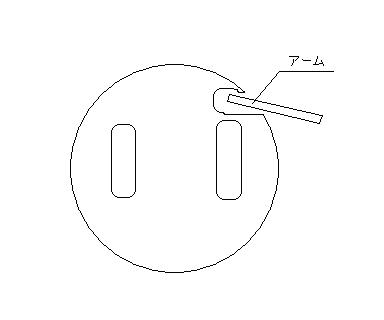
3.2.2. 鍵取得アーム
-
アームにより、鍵の取得と旋回を同時に行い、時間を短縮する。
アームには、柔軟性の高い素材を使用する。
薄いプラスチック板を下図のように曲げ、MIRSに搭載する。
このような形状のアームを180°回転させることで、MIRSが補正をかけずに確実にボタンを押すことができる。
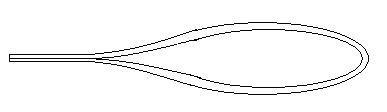
使用していないときは、アームの始点についているモータを回転させることで、アームをMIRS本体に取り込めるよう、設計している。
3.3. ソフトウェア
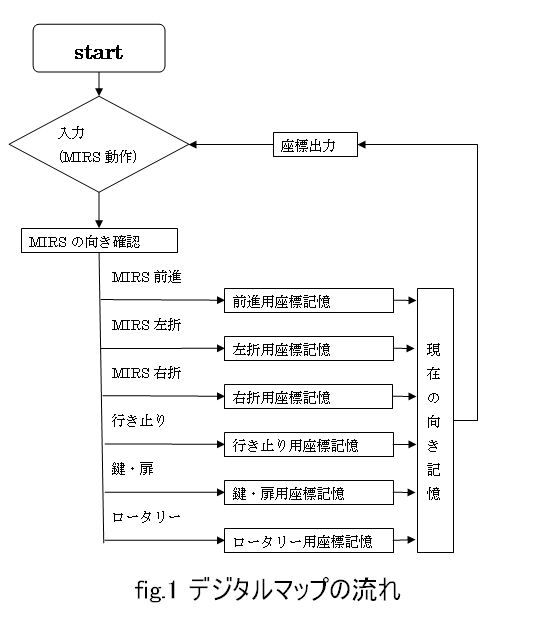
3.3.1. Digital Map
MIRS0905班ではDigital Mapというプログラムを開発することにした。
Digital Mapとは
MIRSがスタート地点から現在地点まで、どのような障害物や通路を経て、通ってきたかを記録するプログラム。
また、そのデータを用いてスタート地点からゴール地点までの最短ルートを割り出し、より短い時間での競技クリアを目指す。
具体的には次の機能を持たせる。
① 現在位置でMIRSがどのようなマス(ロータリー入口、DB前など)と判断したか、どのような動作を行ったか、を記録する。
② 得られたデータより、本戦2回目のルートを(最短ルートを求めて)決定する。
本戦1回目でゴールまで到達できなかった場合でも、本戦2回目ではその位置までの最短ルートを求める。
③ ②のルートをMIRSが動くよう、実行プログラムを作成する。
機体の進行動作のみ行い、センサによる探知・障害物判断等は行わない。
例:前進⇒右折動作⇒ロータリー進入・脱出動作、、、
大まかなフローチャートを次に示す。
競技中起こりうる問題として、次のようなケースがある。
-
・MIRSが現在位置を誤認したまま記憶してしまう。
・あるいは2回目において、MIRSが現在位置を誤認したまま移動してしまう。