|
MIRS2009 �������ʉߓ��� |
|
MIRS0901-SOFT-0004 |
|
�@�Ő� |
�ŏI�X�V�� |
�쐬 |
���F |
�����L�� |
|
A01 |
2009/2/7 |
��� |
���� |
���� |
1.�ړI
2.�T�v
5.�܂Ƃ�
1 �ړI
�@�@�{�h�L�������g�́AMIRS0901�̏������ʉߓ���ɂ��Ă܂Ƃ߂����̂ł���B
2 �T�v
�@�@���̃v���O�����́A�������̓�����Œ����g�Z���T�[�̒l��ǂݎ��A���̏��ɂ���Ă��̌�̍s�����ւ���Ƃ��������@��p���Ă���B
�@�������ɐN�������ۂɍl������p�^�[���͈ȉ���3������
�@�������̓��������ӂ̍��[�ɂ���ꍇ
�A�������̓��������ӂ̒����ɂ���ꍇ
�B�������̓��������ӂ̉E�[�ɂ���ꍇ
����3�̃p�^�[����2�̓���̐�ւ��œ˔j����B
�@,�A�̏ꍇ
1,��苗���O�i
2,�E��90�x��]
3,��苗��(50cm���x)�O�i
4,�E��90�x��]
5,�����g�Z���T�[���ǂ����m����܂őO�i
6,����90�x��]
7,�E�̒����g�Z���T�[�ƃ��[�^���[�G���R�[�_�[��p�����o���T���̊J�n
�B�̏ꍇ
1,�E�̒����g�Z���T�[�ƃ��[�^���[�G���R�[�_�[��p�����o���T���̊J�n
��̓I�ȏo���T������ɂ��ẮAfig.1�� fig.2�Ŏ����Ă���B
fig.1 �������ʉߓ���
fig.1�͓����������̏ꍇ�̓�����s���Ă��邪�A��������E�[�̏ꍇ�́A�H�ȍ~�̓�����s�������ł���B
4 �t���[�`���[�g
�ȉ��ɁA�������ʉߓ���̃t���[�`���[�g�������B�Ȃ��A���̃t���[�`���[�g�́A�������ʉߎ��̓������Œ����������x�̂��̂ɂ����̂ŁA���ۂɃR�[�f�B���O�������e���
�@��ȗ�����Ă��镔��������B
�܂��A���i������100cm�ȏ�Ƃ��������u���b�N�����邪�A����́A�����������Ȃ�����������ɏo��������ꍇ�A�E�̒����g�Z���T�[�����ł͑Ή��ł��Ȃ��̂ŁA
�@�@�u���������ň�苗���ȏ㒼�i�ł����甲����ꂽ�v�Ƃ������f�����邽�߂̂��̂ł���B�u���b�N��ł�100cm�ƂȂ��Ă��邪�A���������邤���ɂ��̒l�͎�ύX���邩������Ȃ��B
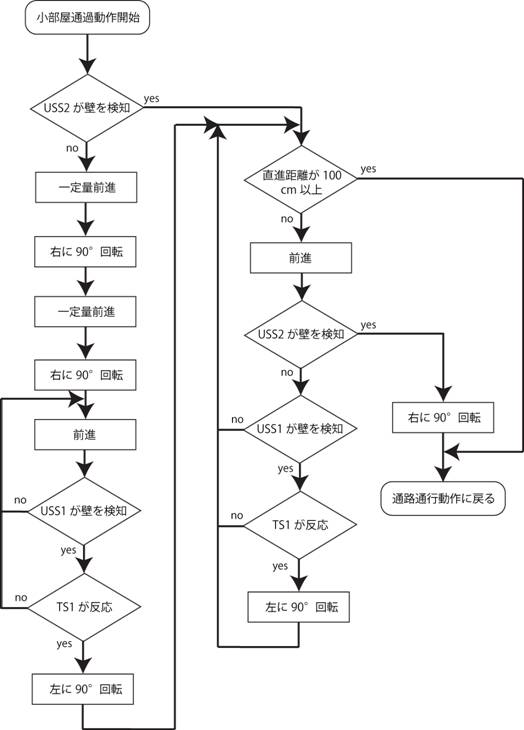
fig.2 �������ʉߓ���̃t���[�`���[�g
5 �܂Ƃ�
�������́A����̋��Z����ł��E�o������\���ł������Ǝv���B�ꌩ�ȒP�̂悤�ɂ��v�������A���肦��S�Ă̏��l���Ȃ��Ă͂Ȃ�Ȃ��̂ŁA�����������Ӗ��ł͑���
�@�@�ۑ�����쐬����ς������Ǝv���B���̃v���O�������쐬����Ƃ��ɐS�������̂́A��ɉE�̕ǂƂ̋��������ɕۂƂ������Ƃ������B�ǂƂ̋��������ɕۂ��Ȃ��ƁA�E�����ɋ�����
�@�@�����Ă��܂��A������F�����Ă��܂��\����������������ł���B���̂��߁A���������g�Z���T�[�ŋ����𑪂��čs������̂ł͂Ȃ��A���^�b�`�Z���T�[�Ōy���Փ˂��邱�Ƃɂ��A���m��
�@�@�ɕǂƂ̋��������ɕۂ��Ƃ��\�ɂ����B
|
�֘A���� |