|
沼津高専 電子制御工学科 |
||||||
|
||||||
|
改訂記録 |
||||||
|
版数 |
作成日 |
作成者 |
承認 |
改訂内容 |
||
|
A01 |
2009.10.17 |
戸塚 |
武藤 |
初版 |
||
目次
1.目的
2.MG3標準機基板との違い
3.図面
4.実装図
5.ピンアサイン
6.部品リスト
7.終わりに
1.目的
この仕様書は、MIRS0901班MG3のモータ制御ボードの仕様を記載したものである。
2. MG3標準機基板との違い
PIC16F88ワンチップで2つのモータ制御ができるようになったところが大きな違いである。
ロータリエンコーダのA相、B相の信号をPICに直接送りPIC内部でカウント値及び回転方向を算出するようにした。
モータドライブに耐圧の大きなFET(ドレイン定格電流30A)を4つ用いたHブリッジ回路を採用したことにより、
MG3標準機よりもパワフルな走行が可能となった。
PICの電源よりも先にモータの電源を入れても、モータドライバが破壊しなくなった。
基板の大きさと枚数が減りスペースを半分削減できた。
※ドキュメント作成者の環境ではPIC16F88は正確に動作しなかったため実際はPIC16F628Aを用いた。
PIC16F88とシリアル通信の端子の位置が違うため実際に作成した回路は以降説明するものとは若干異なるが、
回路製作をするうえで基本的な考え方は変更していないのでこのドキュメントはPIC16F88を使う場合を想定し作成した。
3.図面
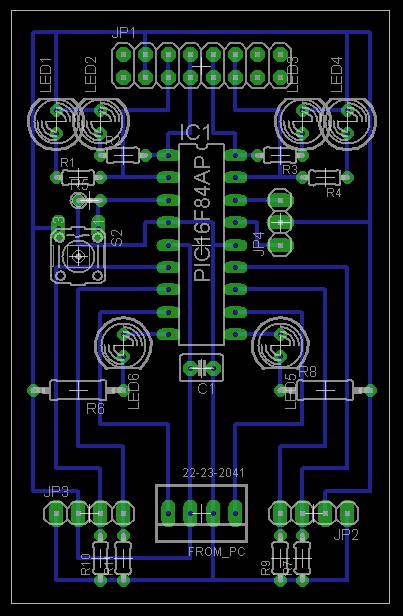
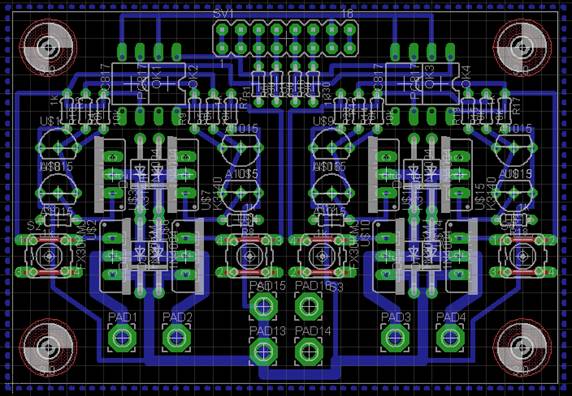
Fig.3.2 BRD図面(モータドライバ部)
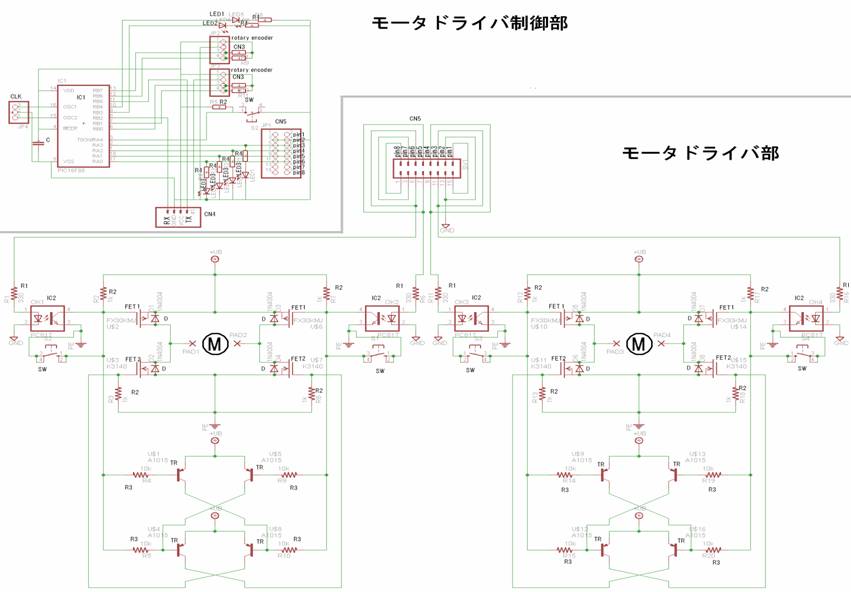
Fig.3.3 回路図
・基本仕様
モータドライブ部にはHブリッジを採用、各モータそれぞれ4つのFETで駆動する。
駆動信号を送る信号線はそれぞれのモータに対して2本ずつである。
信号との対応をTable 3.1 に示す。(正論理)
Table 3.1.モータ動作と信号の関係
|
信号1 |
信号2 |
動作 |
|
0 |
0 |
開放 |
|
1 |
0 |
正転 |
|
0 |
1 |
逆転 |
|
1 |
1 |
ブレーキ |
BRD図面はこだわりのシンメトリージャンパ線零仕様※である。
※シンメトリージャンパ線零仕様とは、左右対象であり、ジャンパー線を使わない仕様である。
ちなみにこれはドキュメント作成者が勝手につけた名称である。
4.実装図
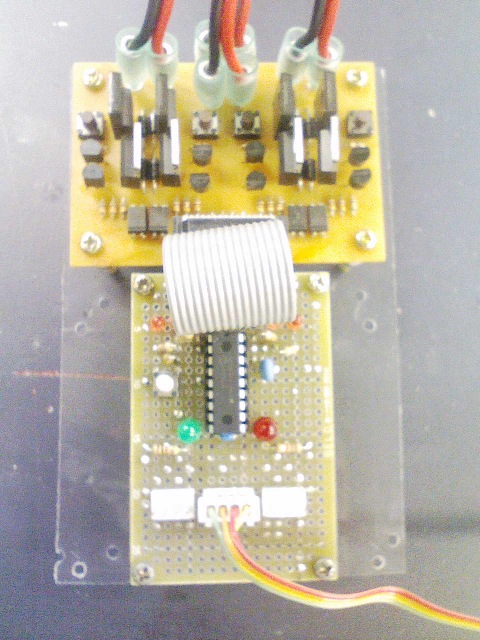
Fig.4.1 実装図(表)
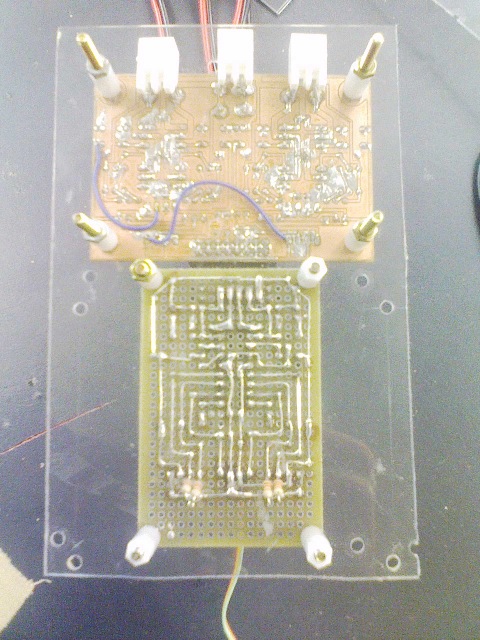
Fig.4.2 実装図(裏)
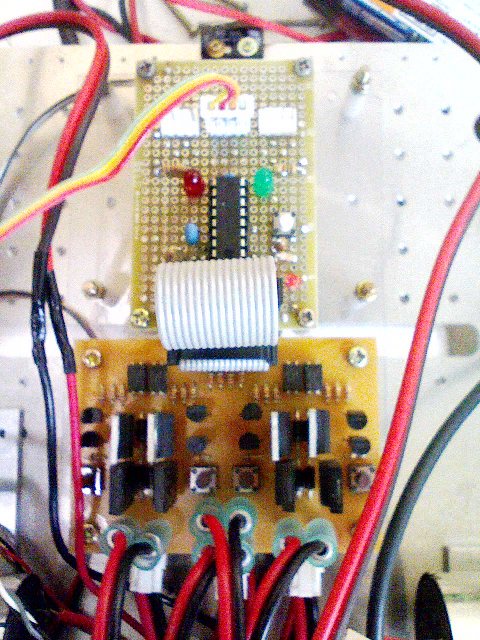
Fig.4.3 実装図(実装1)
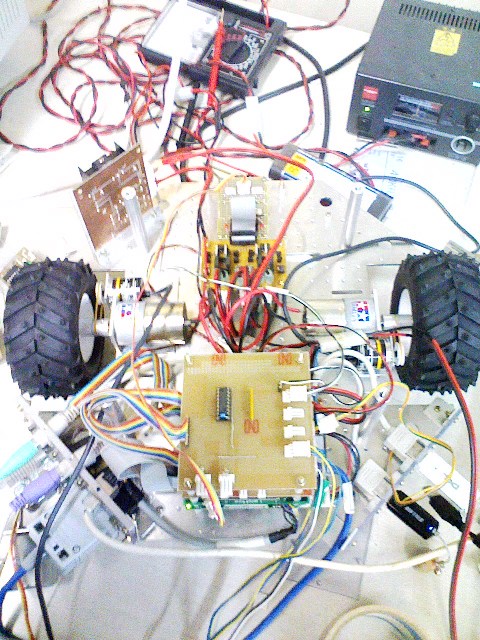
Fig.4.4 実装図(実装2)
Fig.4.3の下の基板がモータドライバ部である。
4つのタクトスイッチで制御信号の介入なしにモータを回転できる。
モータドライブ回路が正常に動作しているかどうかチェックしたいときに使用する。
Fig.4.3の下の基板がモータドライバ制御部である。
3個の内の中央の端子がマザーボードからの電源供給、シリアル通信(送受信)をする。
左右2つの端子が左右タイヤ2つのロータリエンコーダへの電源供給、信号入力(A・B相)をする。
基板上部の4つの赤色LEDはモータドライバへの信号で光るため、モータを回さなくてもLEDの光を見て大まかな動作チェックができる。
PWM制御ができているかどうか視覚的に見るのに適している。
5.ピンアサイン
PICのピンアサインをTable.5.1に示す。
Table.5.1.ピンアサイン
|
ピン名 |
機能 |
|
A0 |
右モータ制御信号線 |
|
A1 |
右モータ制御信号線 |
|
A2 |
左モータ制御信号線 |
|
A3 |
左モータ制御信号線 |
|
A4 |
デバッグ用スイッチ |
|
B0 |
右ロータリエンコーダ入力 |
|
B1 |
右ロータリエンコーダ入力 |
|
B2 |
UART_RX |
|
B3 |
デバッグ用LED(緑) |
|
B4 |
デバッグ用LED(赤) |
|
B5 |
UART_TX |
|
B6 |
左ロータリエンコーダ入力 |
|
B7 |
左ロータリエンコーダ入力 |
6.部品リスト
|
記号 |
部品名 |
商品名 |
数量 |
備考 |
|
IC1 |
PIC |
PIC16F88 |
1 |
|
|
IC2 |
フォトカプラ |
PC817C |
4 |
|
|
FET1 |
FET (J型) |
FX30KMJ |
4 |
|
|
FET2 |
FET (K型) |
2SK3140 |
4 |
|
|
ICS2 |
ICソケット |
18pin DIPタイプICソケット |
1 |
PIC用 |
|
TR |
トランジスタ |
2SC1015 |
8 |
|
|
C |
コンデンサ |
0.1μF 積層セラミックコンデンサ |
1 |
パスコン |
|
CLK |
発振子 |
20MHz セラロック |
1 |
|
|
R3 |
抵抗 |
10KΩ 1/4W 炭素皮膜抵抗 |
8 |
トランジスタ電流制限用 |
|
R2 |
抵抗 |
1KΩ 1/4W 炭素皮膜抵抗 |
9 |
FETとタクトスイッチのプルアップ・ダウン用 |
|
R4 |
抵抗 |
1KΩ 1/4W 炭素皮膜抵抗 |
6 |
LED電流制限用 |
|
R1 |
抵抗 |
330Ω 1/4W 炭素皮膜抵抗 |
4 |
LED電流制限用 |
|
LED1 |
赤色LED |
赤色LED(3mm) |
1 |
デバッグ用 |
|
LED2 |
緑色LED |
緑色LED(3mm) |
1 |
デバッグ用 |
|
LED3 |
青色LED |
青色LED(3mm) |
4 |
デバッグ用 |
|
SW |
スイッチ |
タクトスイッチ |
5 |
デバッグ用 |
|
CN3 |
コネクタ |
MOLEX 3pin |
2 |
ロータリエンコーダ接続用 |
|
CN4 |
コネクタ |
MOLEX 4pin |
1 |
モータ制御信号 |
|
CN5 |
コネクタ |
MOLEX 2×8pin |
2 |
モータドライバ制御信号 |
7.終わりに
今回の改造でPICが一つになり、PIC内部で2つのモータの関係を監視できるようになった。
パソコン側の処理が減りよりリアルタイムで高速な処理ができるようになったことなど様々な効果が期待できる。
その反面、標準機よりもPICへの負担が増えた。
駆動制御程度ならばまだ複雑な処理ではないが、あまり処理を増やすとロータリエンコーダの値を取りこぼしてしまうようなエラーが出るので注意したい。
|
関連文書 |
MIRSMG3D モータ制御PICプログラム仕様書(MIRS0901-ELEC-0006)