|
名称 |
MIRS0803 MIRS エレクトロニクス詳細設計 |
||||
|
番号 |
MIRS0803-ELEC-0001 |
||||
|
版 数 |
最終更新日 |
作 成 |
承 認 |
改 訂 記 事 |
|
|
A01 |
2008/9/18 |
大石 |
鈴木 |
初版 |
|
|
A02 |
2008/9/19 |
鈴木 |
鈴木 |
細部修正 |
|
|
B01 |
2008/12/01 |
大石 |
鈴木 |
詳細追加 |
|
|
C01 |
2009/02/24 |
杉山 |
鈴木 |
全面改訂 |
|
|
Saaaa |
|
|
|
|
|
|
|
|
|
|
|
|
目的
この文書ではMIRS0803のエレクトロニクスに関する詳細設計を述べる。
標準機からの変更点
MIRS0803ではポスト獲得において専用のアームを用いる。そのため、アームを制御するためのボードを組み込む。
GD制御ボードに制御信号を送信するためFPGA回路に信号送信モジュールを組み込む。
ポスト番号識別のため、白線センサを4個縦に並べポストに巻かれているテープの本数を読む。
構造
以下にGD制御ボードに関する構成を示す。
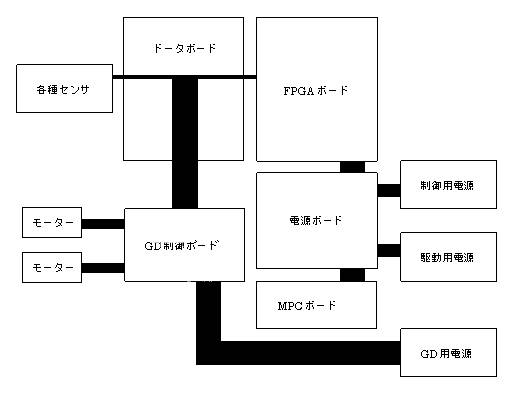
赤外線センサ用のポートからGD制御ボードに対して入出力信号を行う。
GD制御ボードはPIC16F84とモータドライバIC(TA7291P)とモータドライバIC(TA7257P)から構成される。
MIRS本体がpost_getの動作を始めたとき赤外線センサ用のポートからGD制御ボードに対して信号を送る。その信号を受けるとPICに入力したプログラムによりモータを制御し、ポストを獲得する。
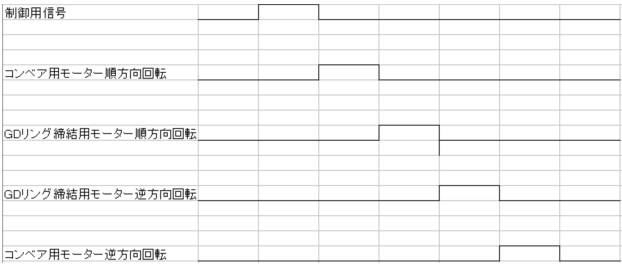
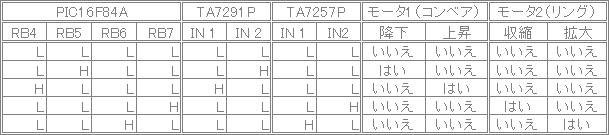
以下に動作のタイミングチャートとボード制御信号の真理値表を示す。
FPGAおよびGDの仕様は以下のドキュメントに示す