|
名称 |
MIRS 完了報告書 |
||||
|
番号 |
MIRS0803-DSGN-0004 |
||||
|
版 数 |
最終更新日 |
作 成 |
承 認 |
改 訂 記 事 |
|
|
A01 |
2009/02/24 |
宮地 |
鈴木 |
初版 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
目次
1. 開発過程分析
2. 開発工数分析
3. 現システムの問題点
4. 総括
1.開発過程分析
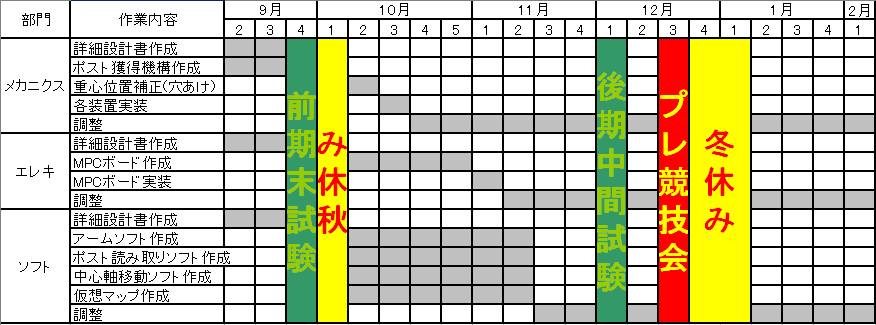
予定していた開発スケジュールと実際の開発スケジュールを比較する。
開発予定
実際
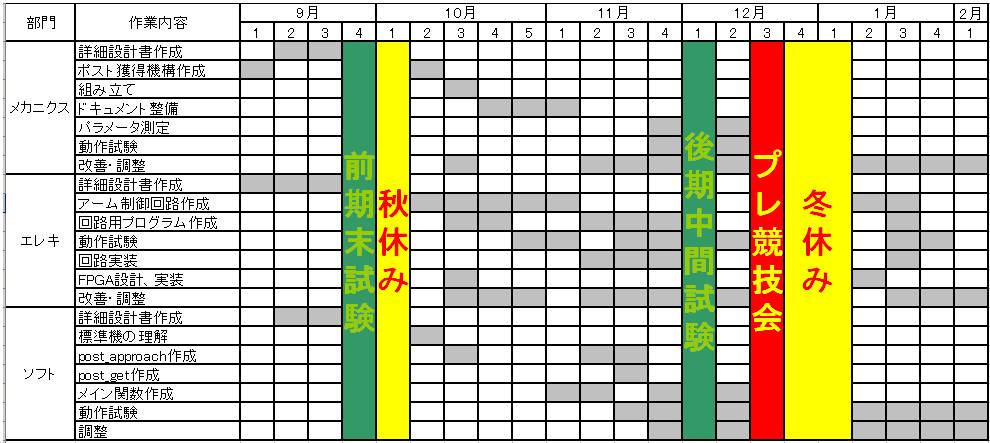
以前、開発計画書作成時には思いつかなかった作業を、実際の開発スケジュールに入れた。
メカに関して
開発計画当時では9月にアームを作成する予定だったが、メカの班員が夏休みまでに機構を作成し終えてしまっていたので、メカにはドキュメントの整備をしてもらった。
また、重心の位置の補正のために機体に重心調整用にCPUボード用に穴を空ける予定だったが、重心が概ね中心に補正してあったのでその作業はスケジュールから除いた。
概ねメカはスケジュールどおりに作業を進めてくれた。
エレキに関して
思い通りの動きをしてくれるアーム制御回路がうまくできなく、その分時間がかかってスケジュールより長引いてしまった。
ソフトに関して
ソフトは、基本的なプログラムについては早期に作成することができたので、そのぶん予定になかった新たな関数の導入などに時間を費やすことにできた。
パラメータやアームの問題が解決するのに時間がかかったため、動作試験や調整を後半で一気にやることになり、エレキ、メカと平行して仕事をすることになった。
2.開発工数分析
作業に当てた時間を個人ごとに集計すると次のようになった。集計した時間は2月13日までのものである。

3.現システムの問題点
現在発覚しているシステムの問題点を以下に示す。
メカトロニクス
・ パラメータがよくない。角度を一周あたり−15度くらいずれる。
・ まれに、なぜか下のタッチセンサが先に検知してしまう。そのため、アームが降りなく、思ったとおりに動かないことがあった。
・ シャーシ下のねじがフィールドに当たってしまい、抵抗となった。
エレクトロニクス
・アリテックダウンロードをしてFPGAを毎回読み込まなければアーム動作しなかった。
・超音波センサが突然9999や、208を返してきて、動作がうまく働かないことがあった。原因として考えられたのが、ドータボードとコネクタの接触不良とプログラムの問題が考えられた。
・パナソニックの電池を制御用に使うと信号を受け取れなくなった。
ソフトウェア
・ パラメータ誤差による角度の誤差。
・ ポスト獲得時に予期せぬ動作がしばしば起きた。
・ 中心からでしかポストを探さないので、超音波の調子や、ポストが重なってしまっているとすべてのポストを探すことができない。
・競技場外の物をポストと誤って認識してしまうことがある。
4.総括
マネージャー(宮地)
0803では、メンバーがそれぞれ動いてくれて、マネージャーとして苦労することがあまりなかった。
結果が2位だったのも、メンバーがそれぞれ動いてくれたからだと思う。1位じゃなかったのは、自分の力不足だったのではないかとあとになって思います。
0803では人員をメカ、エレキ、ソフトにそれぞれ配置してMIRSを製作したが、メカ⇒エレキ⇒ソフトの連携が思ったよりスムーズにいき、それぞれが自分のタスクが終わっても、MIRSのメンテナンスや、ドキュメント整備など、今できることをしてくれた。そのため、自分はサポート役に徹することができた。0803の班員全員に、感謝を示したいと思う。ありがとうございました。
この場を借りて、メカから順に一言ずつ感謝を示したい。
水口裕樹
メカは、水口が率先して行動してくれたおかげで、MIRSの製作がスムーズにいきました。水口、佐々木が夏休み明けにベルトコンベアを仕上げてきたときは本当に驚きました。メカが終わっても、機体改良や、ドキュメントを作成してくれて、助かりました。ありがとうございました。
佐々木孟留
佐々木は、水口のサポートに徹してくれたと思います。水口のかげで働いているのを見ていました。時々一緒にメカをサポートしました。パラメータの測定のときも、誘ったら喜んで手伝ってくれました。ありがとうございました。
杉山昂太郎
昂太郎が、ベルトコンベア、GDを動かすようにしてくれました。回路は昂太郎しかわからなくて、自分がサポートできることは少なかったです。すいません。昂太郎がいなかったら、ポストを獲得できなかったです。ありがとうございました。
大石康童
FPGAがんばったね。
野本拓也
ソフトがんばったね。
鈴木良輝
ドキュメントがんばったね。
アライ
フィールドのアイロンがけがんばったね。
最高のメンバーでした。また打ち上げカラオケ行きましょう。