目次
1. 本ドキュメントについて2. 設計コンセプト
3. システム構成
4. 動作概要
5. システム概観
1. 本ドキュメントについて
-
このドキュメントは、MIRS0802のシステムを提案する為のものである。
2. 設計コンセプト
-
MIRS0802の設計コンセプトはポストを全て獲得することを目標とし、尚且つパフォーマンスも重視するということである。
そのために今回提案するMIRSでは、あらかじめ動作パターンを何種類か用意しておき、ポストの配置に合わせてその動作をコマンドによって切り替えられるようにする。
また、パフォーマンスも重視し、ポストの獲得操作および移動中の動作を奇抜なものにする。
3. システム構成
3.1. ハードウェア構成
| 使用するセンサ | |
|---|---|
| 白線センサ | 6個 |
| 超音波センサ | 4個 |
| タッチセンサ | 2個 | 追加するハードウェア |
| ポスト獲得用アーム | 2本 |
| アーム用モータ | 2個 |
| ポスト正対バーコードリーダ | 1本 |
| ポスト正対バンパ | 1個 |
これにより周回動作で発生する誤差を軽減する。
また、赤外線センサを使用せずにポストのバーコードに合わせたバーコードリーダを作成する。
これも周回動作を省くためのものであり、使用センサ数を減らすことも目的のひとつである。
3.2. ソフトウェア構成
-
ポスト探索プログラムは以下の動作概要のように作成する。
ポスト獲得プログラムはアームの制御プログラムとして作成する。
ポスト判別用プログラムは上部に設置した白線センサによりポスト上部の黒白を判別する。
また、変更点に応じて全体のプログラムを調整する。
4. 動作概要
-
ポスト獲得の方法は、以下の流れで行う
- ポストに接近する
- アーム展開
- ポスト獲得
- アーム収納
- 後退
尚、全体の流れ(探索、確認、他)は競技により次のように分けるものとする。
4.1. 競技1回目
-
ライントレースを行い、近いポストから順番に獲得していく。
ポスト接近時(獲得時)にバーコードリーダを用いてポスト番号、位置(座標)等、ポスト情報を記録する。
4.2. 競技2回目
-
ライントレースは行わず、競技場の中心線を通過しながらポストを獲得する。
このとき、競技1回目に得たポスト情報を用いて順番通りにポストを獲得していく。
5. システム概観
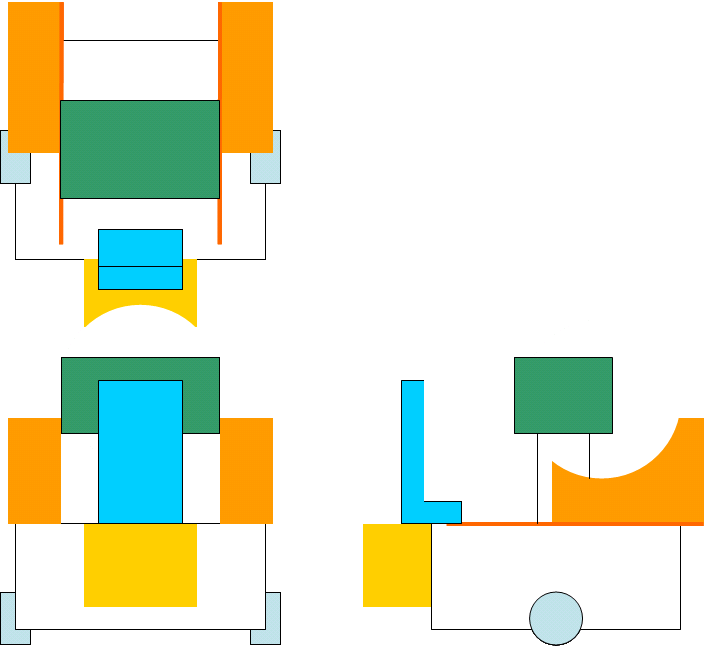
| ボード類 | |
| センサ類 | |
| アーム |
図1. 概観図 (img002.bmp)
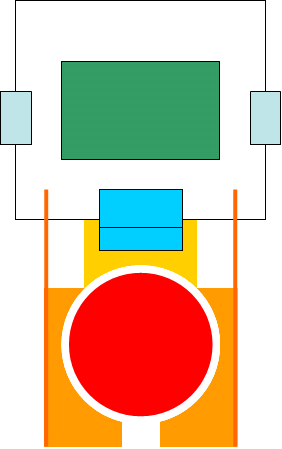
図2. アーム展開時 (arm004.bmp)