目次
1. 本ドキュメントについて2. 設計コンセプト
3. システム構成
4. 動作概要
5. システム概観
1. 本ドキュメントについて
-
このドキュメントは、MIRS0802のシステムを提案する為のものである。
2. 設計コンセプト
-
MIRS0802の設計コンセプトはポストを全て獲得することを目標とし、尚且つパフォーマンスも重視するということである。
そのために今回提案するMIRSでは、あらかじめ動作パターンを何種類か用意しておき、ポストの配置に合わせてその動作をコマンドによって切り替えられるようにする。
また、パフォーマンスも重視し、ポストの獲得操作および移動中の動作を奇抜なものにする。
3. システム構成
3.1. ハードウェア構成
-
超音波センサを回転盤のようなものに取り付けMIRS本体が回転しなくても超音波によるポスト探索ができるようにする。
MIRSにアームなどを搭載し、標準機のポストの獲得動作であるポストの周回動作などを省く。
3.2. ソフトウェア構成
-
ポスト探索プログラムは以下の動作概要のように作成する。
ポスト獲得プログラムはアームの制御プログラムとして作成する。
ポスト判別用プログラムは上部に設置した白線センサによりポスト上部の黒白を判別する。
4. 動作概要
4.1. 競技1回目
-
以下の2パターンをコマンドにより使い分ける。
4.1.1. 動作概要 パターン1
-
フィールドの中心に移動。
超音波センサでポストを探索。
白線センサでポストの番号を確認。
順番通りであればポスト獲得動作に移る。
違う場合は次のポストに移る。
繰り返し。
4.1.2. 動作概要 パターン2
-
ライントレースを行う。
超音波センサによりポストを探索。
ポストに近づきポスト番号の確認。
順番通りであればポスト獲得動作に移る。
違う場合はまたライントレースを行い、次のポスト探索を行う。
繰り返し。
4.1.3. 動作概要 共通
-
アームなどを用いてポストを獲得する。
4.2. 競技2回目
-
競技1回目により得たポスト情報を用い、最適な動作で順番通りポストを獲得していく。
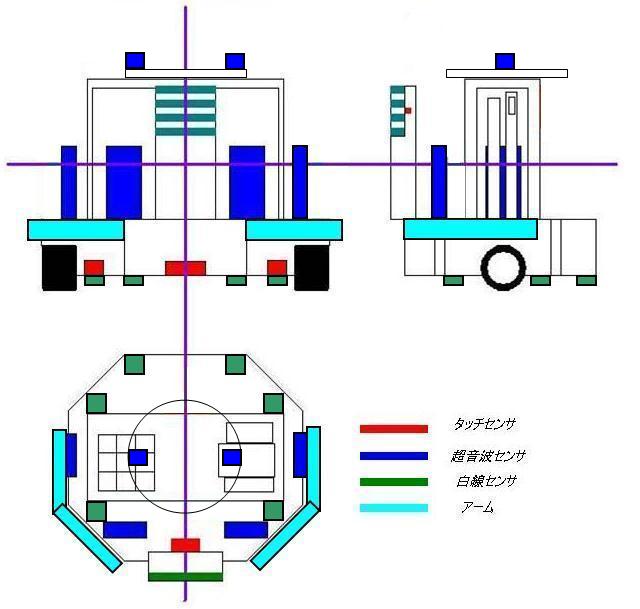
5. システム概観