|
MIRS2008 システム提案書 |
|
MIRS0801-DSGN-0001 |
|
版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
|
A01 |
2008/6/23 |
和泉 |
和泉 |
初版 |
|
A02 |
2008/7/17 |
和泉 |
和泉 |
外観図の追加 LCD→VFDに変更 予算の変更 |
|
|
|
|
|
|
1 設計コンセプト
(1)MIRS自体に最適なプログラムを判断させ、臨機応変に対応させる。
(2)誤差は生じるものと考え、誤差を許容させる。
(3)タイムロスの削減。
(4)観客を楽しませる。
2 システムの特徴
2.1ポスト探索方法
動作概要で詳しく述べる
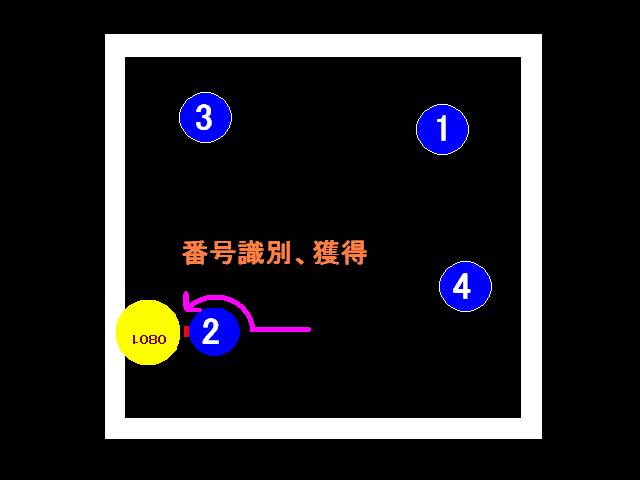
2.2 ポスト番号の判別法
標準機同様、ポストを周回し、赤外線センサを用いてポスト番号を読み取る。
赤外線センサ下部にアームをつけ、これを伸ばすことにより、ポストを獲得する。これによって番号の判別とポストの獲得を同時に行うことができ、時間を短縮させることができる。
2.4 座標認識システム
獲得したポストの位置、番号を直交座標系で表現する。これを用いて2回目の動作に生かす。
VFDによるMIRSの現状把握
LEDではなくVFDを用いることによってMIRSの状態を観客にわかりやすいように表現する。
3 システム構成
3.1 ハードウェア構成
赤外線センサ×1(ポスト番号認識)
タッチセンサ×3(ポスト獲得)
白線センサ×1
超音波センサ×4(ポスト探索)
LCDボード
3.2 ソフトウェア構成
ポスト間移動プログラム(動作概要で詳しく述べる)
座標認識システム
VFD制御プログラム等
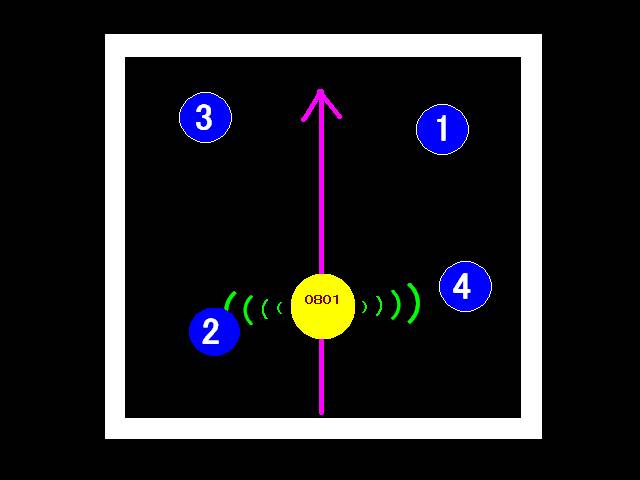
4 動作概要
1回目
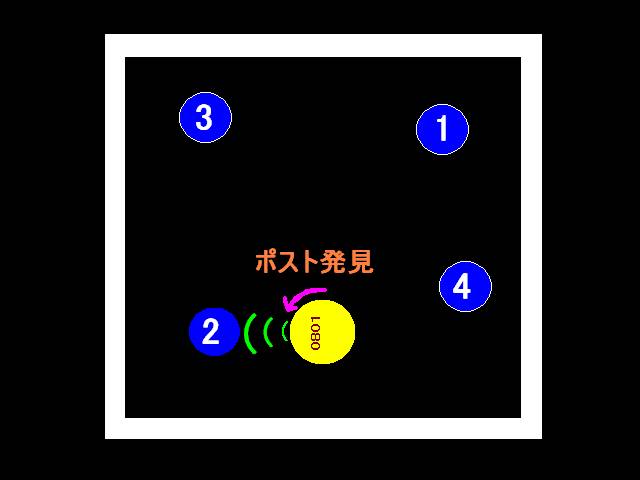
スタート位置からMIRSを前進させつつ、超音波センサでポストを探す。
ポストを見つけたらすぐにそれを獲得しに行き、元のラインに戻るようにする。
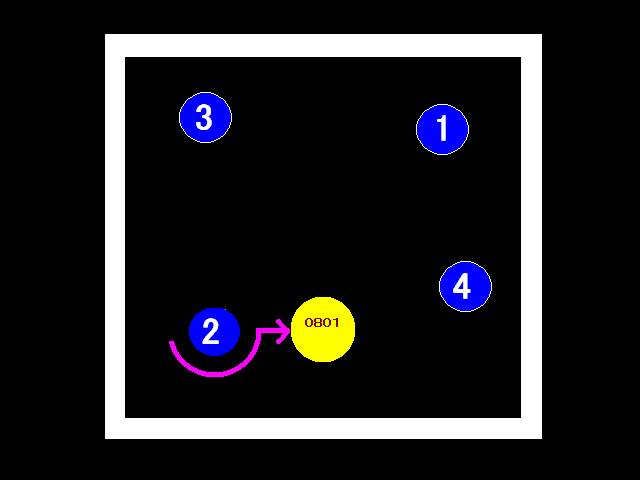
これを繰り返しながら対向する白線を目指す。
白線を見つけ、またまだ取れていないポストが存在した場合は180度回転し、同じように動作させる。
2回目
1回目で取れたデータを元に次のプログラムから最適なポストの獲得方法を選ばせる。
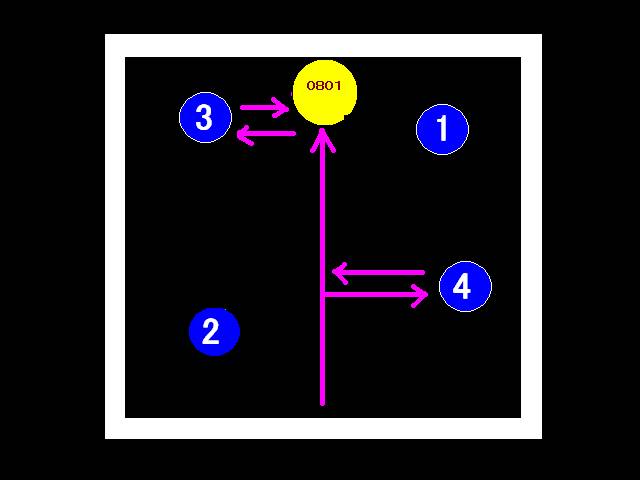
① 最短のルートを考えさせ、順番にポストを獲得する。
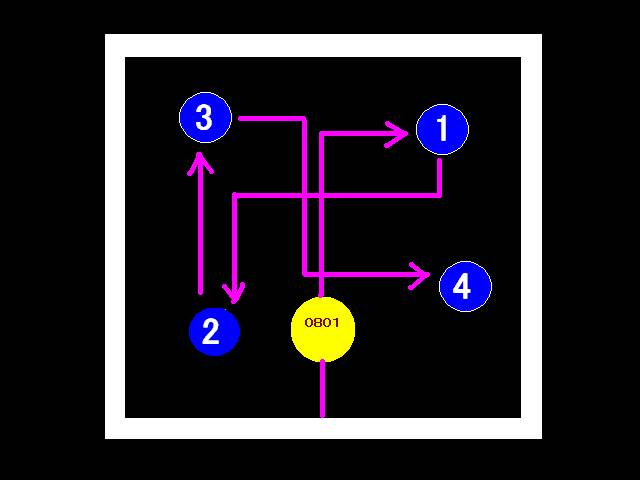
↓ ①で障害物、または誤差の影響が大きくなると考えられる場合
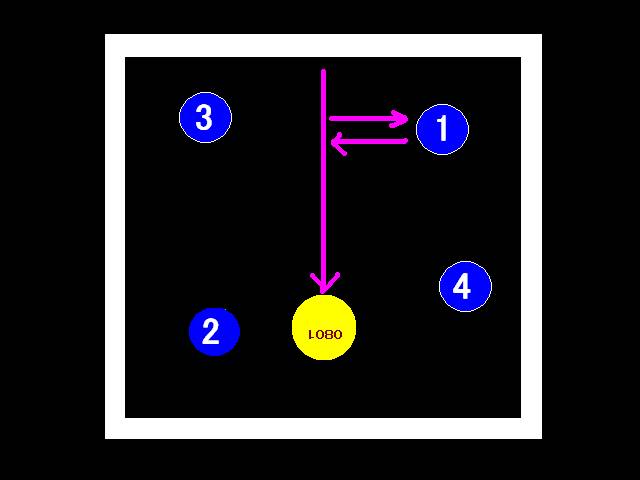
② 中心で回転させ、順番にポストを獲得する。
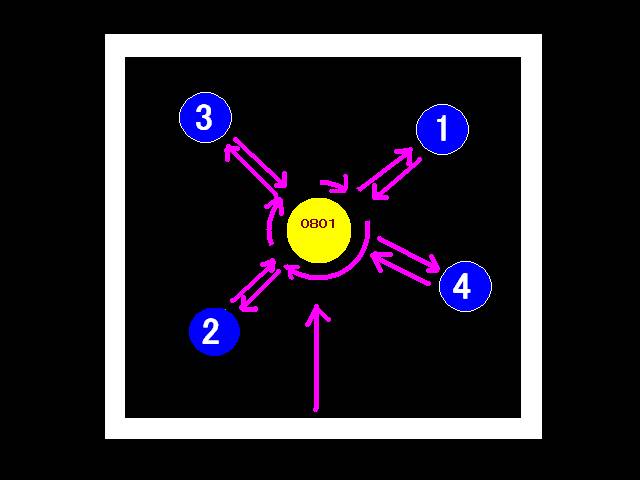
↓ ポストをすべて見つけていない場合
③ 1回目と同じように動作させる。
5 MIRSの外観
6
予算
VFDボード 10000円
PIC16F877 500円