3.モード遷移表
3.1.競技1回目
競技1回目の各モードの遷移表をfig.1に示す。
3.2.競技2回目
競技2回目の各モードの遷移表をfig.2に示す。
| 沼津高専 電子制御工学科 | ||||||
| ||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2007.9.18 | 加賀美・石川・清水・中島 | 中島 | 初版 | ||
2.1.基準位置移動モード1 move1()
スタート位置から競技場中心まで移動する。2.2.基準位置移動モード1 move2()
(この間にポストがある場合、ポストを回避して中心に移動する。)
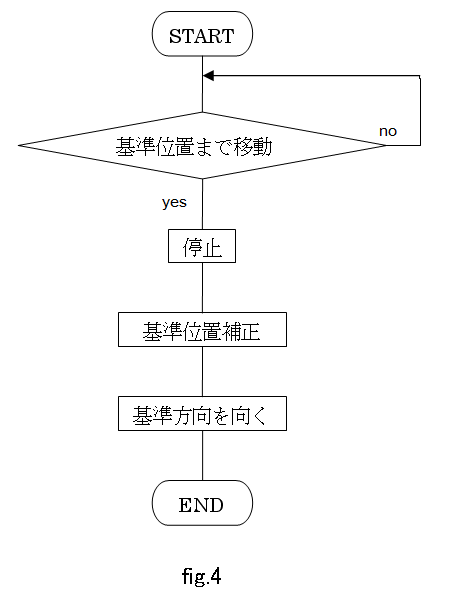
現在ポストから基準位置まで移動し、基準方向を向く。2.3.ポスト探索モード post_search()
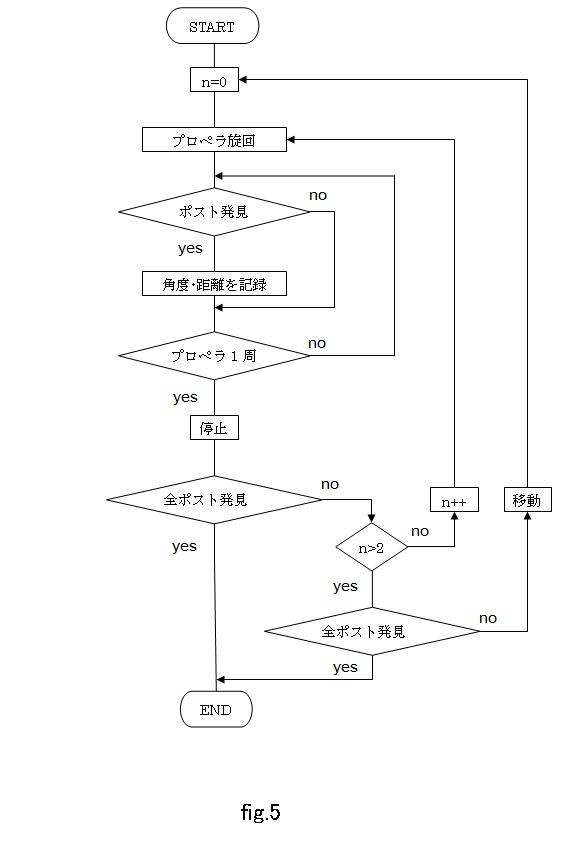
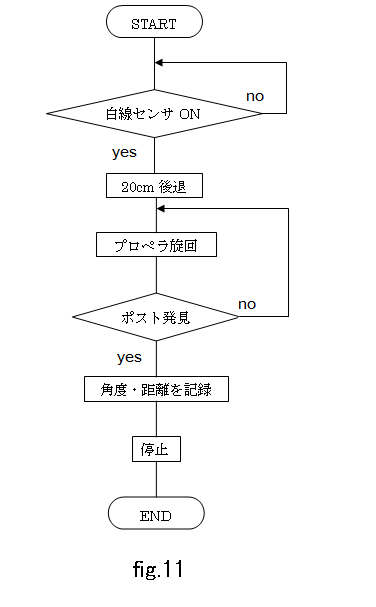
『基準位置移動モード1』で移動した基準位置で、プロペラを回転させ、2.4.ポスト接近モード post_approach()
超音波センサでポストを探索する。
ポストを発見したら、基準方向からの角度と、基準点からの距離を記録する。
プロペラの回転回数に上限をかけ、その上限を超えるか、
全てのポストを発見したら終了。
全てのポストを発見できなかった場合、移動して再度探索。
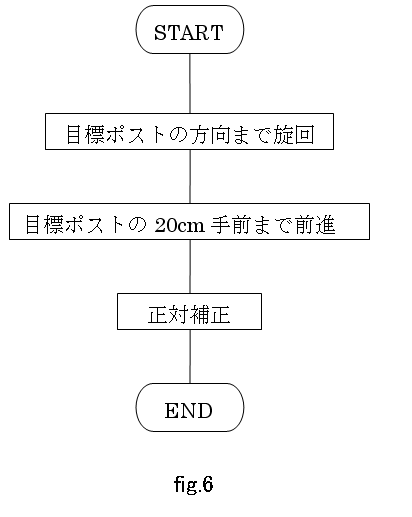
競技場中心から最も近い位置にあるポストに近づく。2.5.ポスト周回モード post_turn()
ポストに近づいたら、超音波センサを用いて、ポストに対して
MIRSが垂直になるようにする。
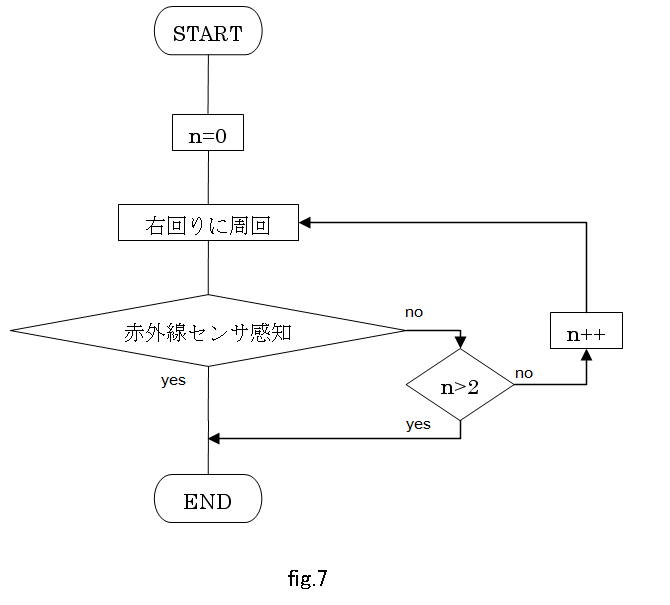
右回りにポストを周回する。1周しても赤外線センサに反応がない場合は、2.6.ポスト番号判別モード post_check()
最大3周まで周回する。
MIRS0703の左側の赤外線センサでポスト番号を確認する。2.7.ポスト獲得モード post_get()
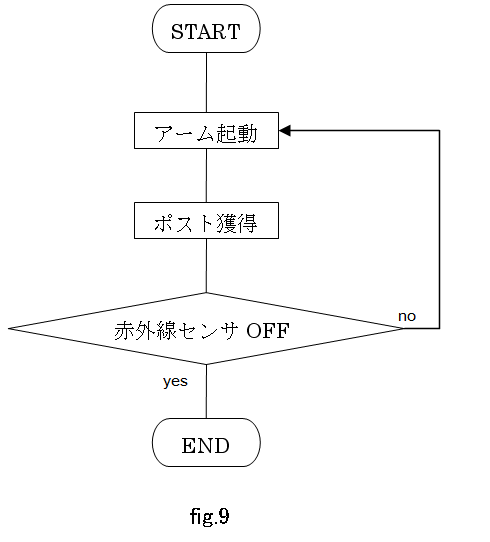
『ポスト番号判別モード』の後、MIRS左側のアームを動かし、ポストを獲得する。2.8.ポスト間直接移動モード post_to_post2()
アームをしまう際に赤外線が消えていなかった場合、3回までアームでの
ポスト獲得動作を行う。
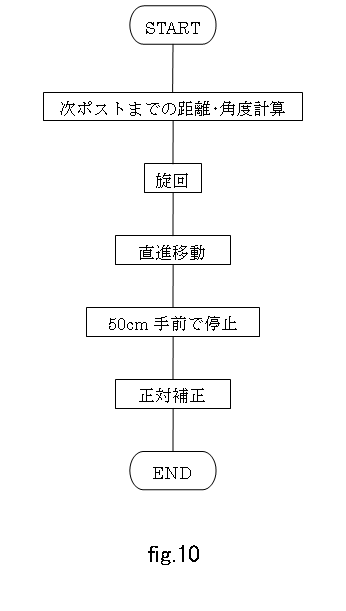
『ポスト探索モード』で記録した角度・距離の情報から、次の目標ポストまでの2.9.白線回避モード line_evasion()
距離と、その方向を向くのに必要な旋回角度を計算する。
『基準位置移動モード2』で移動した基準位置から次の目標ポストまで移動する。
白線を感知したら回避行動を行う。
プロペラを回転させ、最も近いポストを探索
最も近いポストに接近し、『ポスト周回モード』に移る
3.1.競技1回目
競技1回目の各モードの遷移表をfig.1に示す。
3.2.競技2回目
競技2回目の各モードの遷移表をfig.2に示す。
4.1.基準位置移動モード1 move1()
4.2.基準位置移動モード1 move2()
4.3.ポスト探索モード post_search()
4.4.ポスト接近モード post_approach()
4.5.ポスト周回モード post_turn()
4.6.ポスト番号判別モード post_check()
4.7.ポスト獲得モード post_get()
4.8.ポスト間直接移動モード post_to_post2()
4.9.白線回避モード line_evasion()
| 関連文書 |
|---|