2.製造方法
2.1.概略
MIRS0703では、ポスト獲得のためにアームを用いるが、そのための制御基盤を設計・製作する。2.2.製作手順・方法
アームの出し入れはPICを用いて制御する。
PICプログラムで可逆転ドライバを制御する。
ボード実装図(回路図)をfig.1に示す。
・部品表と実装図を見ながら、背の低い部品から順番に基盤に取り付けはんだ付けしていく。
・製作には、半田ごて、はんだ、はんだ吸い取り線の工具を用いる。
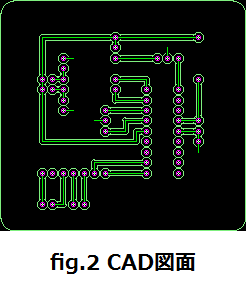
2.3.CAD図面
基盤図を製作するために用いるCAD図面をfig.2に示す。2.4.使用部品
ボードを製作するにあたり使用する部品を次の表.1に示す。