2.開発計画
| 沼津高専 電子制御工学科 | ||||||
| ||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2008.3.7 | 全員 | 中島 | 初版 | ||
4.プレ競技会
0点
4.競技会
1回目:0点
2回目:棄権 合 計:0点(5位)
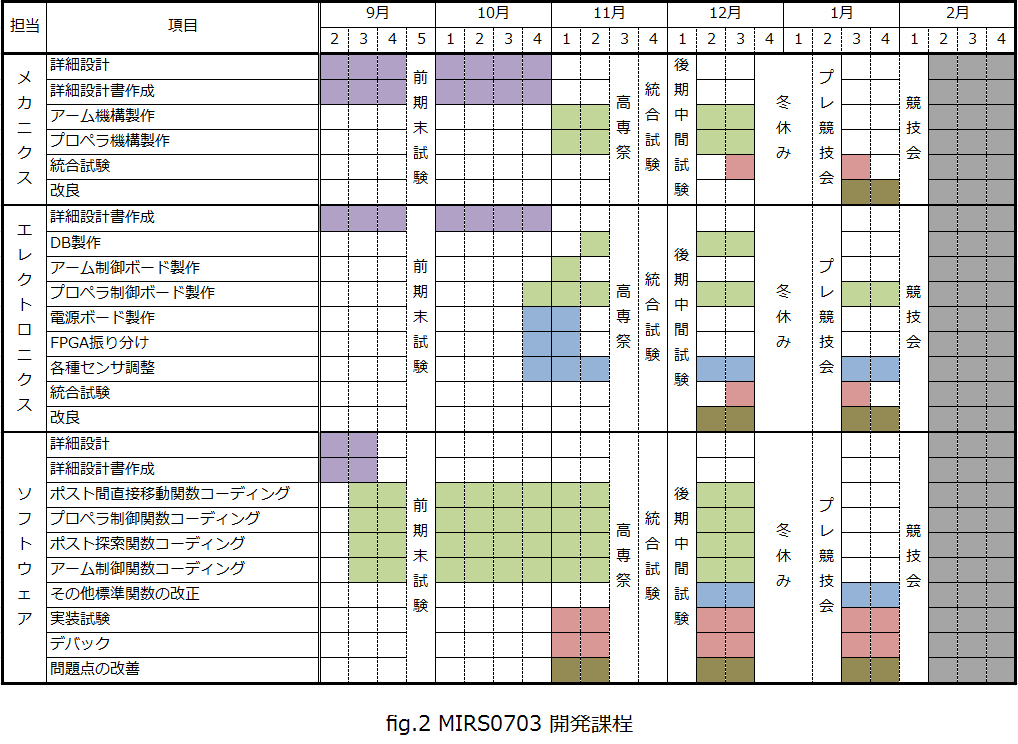
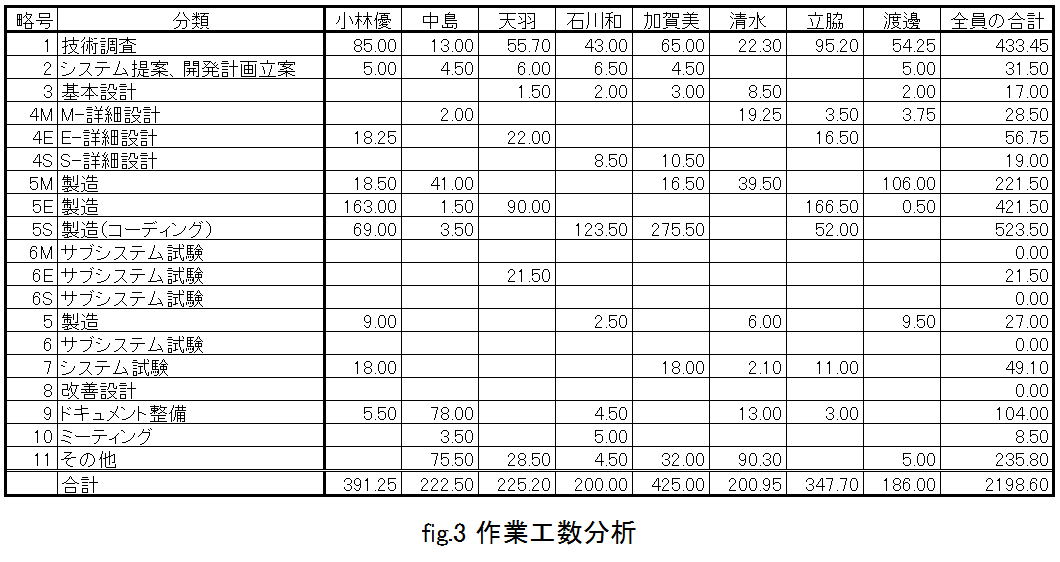
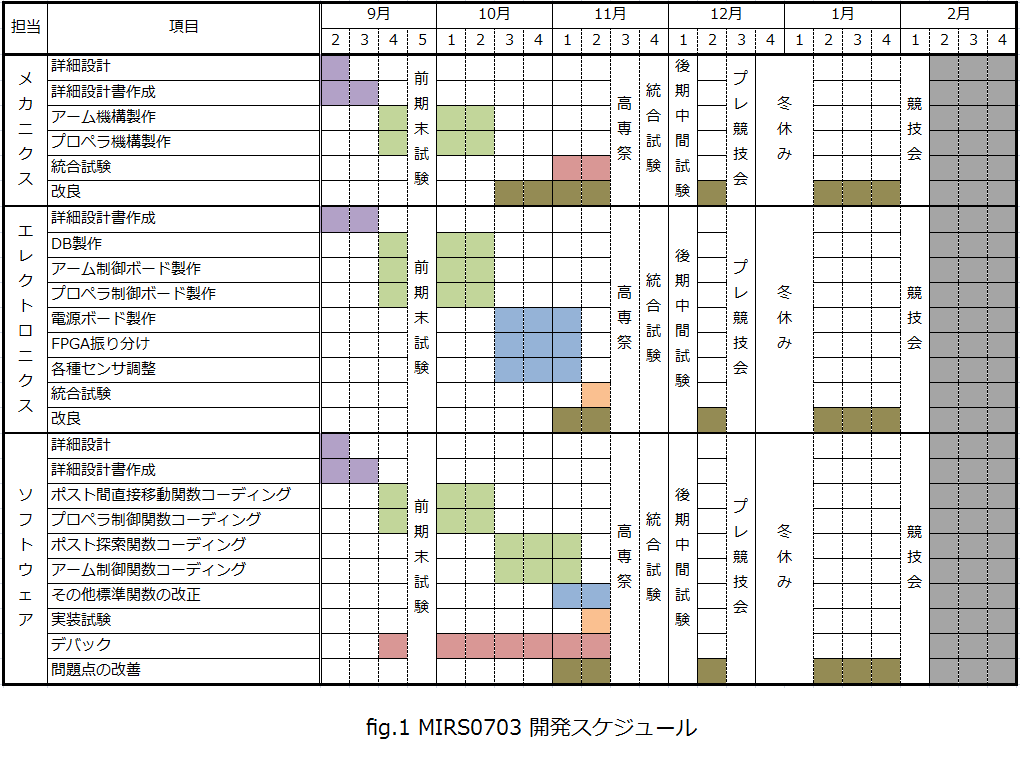
各作業時間は、授業時間外の活動も含んでいる。
発注したステッピングモーターの到着の遅れから、
システム全体の開発が遅れる結果となった。
・ステッピングモータがボードを介して動かない。
-----抵抗のオーダーが10^3Ω間違っていた。オーダーを低くしたら無事動くようになった。
・アームボードが正常に動いていたのにもかかわらず、動かなくなった。
-----過電流が流れたために、モータドライバが破損。付け替えて修正した。
・ステッピングボード、アームボードへの信号が正常に出ていない。
-----ドーターボードの配線を大幅に修正。信号は出るようになった。
加えてFPGA回路を変えて、本来の信号を出すようにした。
・超音波センサの不具合
-----ここに大きく手惑い、最終的にこの不具合によってミルス自体が動かなかった。
可変抵抗の値を変更したりしたが治らなかった場合、ドーターボード、FPGAの抜き差しを行うと治ったりする。
・補正がしっかりできず、ポスト周回時にアームが届かない
-----補正の精度を上げる必要がある。またはアームの長さを長くする。
・デバッグが完了していない
-----開発の遅れにより、デバッグに時間を割くことが出来なかった為、
デバッグを十分に行えていない部分が多数残っている。
マネージャーより
個人個人の能力は計り知れないほど大きいのにもかかわらず、
僕の管理不足によりその力量が十分に発揮されずに終わってしまった。
たった8人の班員でも、開発環境場所が違うと目を張れず、指示待ち人間が出来てしまう。
そういう人の使い方や急かす方法がわかるのがミルス開発の終盤であったのにも問題があった。
次の機会はこの班でやることはないけれども、同じ過ちをしないようにしていきたい。
開発当初、ソフト、メカが先行していたがエレキのステッピングモータの発注に大きく手間取り、
結果メカ以外の部署が遅れてしまったのが痛かった。
発注もはやく届くものを選ばないといけないことを知った。
すべてをステッピングモータのせいにするわけでもないが、やはり人員配置ミスが大きなダメージと言える。
卓上論では動くものが、出来上がった当初では動かないにしても、
試行錯誤を繰り返して動くようになったときには大喜びで、ものづくりというものが感じ取れた。
結果は最悪であったが、まじめにやった人たちにとっては大きなプラスになったであることには変わりはない。
| 関連文書 |
|---|