|
沼津高専 電子制御工学科 |
||||||
|
||||||
|
改訂記録 |
||||||
|
版数 |
作成日 |
作成者 |
承認 |
改訂内容 |
||
|
A01 |
2007.9.18 |
齋藤・平田・藤田 |
平田 |
初版 |
||
|
A02 |
2007.10.22 |
齋藤 |
平田 |
ドーターボードの画像の差し替え |
||
|
A03 |
2007.2.15 |
藤田 |
平田 |
ステッピングモータの回路図の差し替え |
||
目次
1. FPGA
2. ドーターボード
3. ステッピングモータ
1. FPGA
FPGAにおいて、追加するセンサ類の入出力に使用できそうなピンは他にないかと思い、回路図を見て余っていそうなピンを探してみた。
その結果、まずJP30CにはVccが6ピン繋がっていて、残りの14ピンは空いているように見えるが、JP30Cは入出力用のピンではないため却下。
次に、JP40A〜Cが「ユーザーI/O」の入出力ピンとなっていたため注目してみたが、FPGAの資料からこれらのピンはBUSに接続されていることが分かったため、JP40A〜Cも我々は入出力ピンとして使用することができないということになる。
つまりFPGAにおいては、使用しない既存の機能を削除し、空いたピンに新たな機能を追加する必要があることは確実である。我々は、LCDの表示機能を削除して、追加する超音波センサや回転板機構などのピンを確保する。
次に、それに伴うDBの変更点についてである。
2. ドーターボード
基本設計に基づき、ドーターボードの回路図を以下のように改造する。
それぞれ新たに追加したところの名前の説明をする。
DB_USS1〜6 今まで3つあったドーターボードと超音波センサを繋ぐコネクタを、新たに3つ追加するために、今まで液晶ディスプレイ用に使っていたところを削除して超音波センサ用に変更した。それぞれ5ピンになっているが、番号順にVcc、超音波センサ送信信号、超音波受信信号、超音波センサ受信タイミング信号、GNDとなるように設計してある。
DB_RB ドーターボードと回転板制御用ボードを接続するためのコネクタを5ピンで用意する。これも液晶ディスプレイの使っていたところに接続する。5ピンの内訳は番号順に、Vcc、回転板制御用入力信号1、回転板制御用入力信号2、回転板制御用入力信号3、GNDとなっている。
LED DB_USSやDB_RB同様に液晶ディスプレイ用の回路のあったところにLED表示板と接続するためのコネクタを用意する。3ピンの内訳は番号順にLED点灯信号1、LED点灯信号2、LED点灯信号3となっている。
回転板制御用のボードの詳細については後述するのでそちらを参照していただきたい。
標準MIRSのドーターボードではJP60CのGNDのピンの14本すべてを使用しているが、これはノイズによる影響を極力少なくするためであるので、変更しないこととする。
同様にVccのJP30CのピンでもVccとして6つのピンを使用しているが、これは必要な分の電気の容量を確保するために1ピンだけでは足りないので6ピン使用していると考えられるのでこれもそのまま使用することにする。
なお、FPGAボードの仕様についてはメーカー発行の取扱説明書があり、長澤先生に借りることができる。また、MIRS0605がスキャンしたデータがMIRSデータベースにあるため、そこのURLも以下に示しておく。
http://www2.denshi.numazu-ct.ac.jp/mirsdoc2/mirs0605/tech/num0006a/
3. ステッピングモータ
以下にステッピングモータ制御回路を示す。
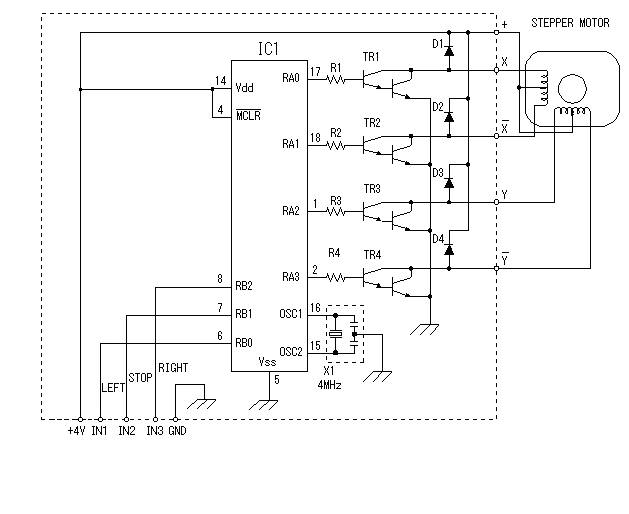
R1〜R4 (抵抗) :2 [kΩ]
TR1〜TR4 (トランジスタ):D794A
D1〜D4 (ダイオード) :1S1588
ちなみに、搭載しているバッテリーからVccを取る方法だと電力が不足することが分かったため、新たにバッテリーを搭載しそれを4[V]までレギュレートしVccとすることにした。そのため、新たにRB用のレギュレート回路を追加する。
そのレギュレート回路の回路図を以下に示す。
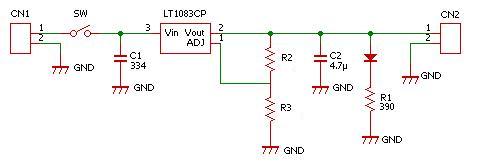
この図で、
R1:抵抗390[Ω]
R2:抵抗2[kΩ]
R3:抵抗4.3[kΩ]
C1:積層セラミックコンデンサ
334
C2:電解コンデンサ4.7[μF]
LT1083CP:3端子レギュレータ
である。