システム基本設計書
|
MIRS0601-DSGN-0002
|
|
版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
|
A01 |
|
平口 |
平口 |
初版 |
|
|
|
|
|
|
|
|
|
|
|
|
目次
1.
システム概要
① システム要求
② ハードウェア
③ ソフトウェア
④ 概観
2.
機能・性能
① ハードウェア
② ソフトウェア
3.
実現方法
① ハードウェア
② ソストウェア
1.システム概要
①
システム要求
白線に沿ってフィールドを右回りに周回し、本体左側に取り付けられた超音波センサでポストを発見する。発見次第ポストの正面を向き、本体前方に取り付けられたタッチセンサにポストが接触するまで接近する。タッチセンサが反応すると前方の白線センサが稼動し黒テープの数をカウントする。それによりポスト番号をすばやく判別できる。私たちの班が実現したいことは、
1. ポスト番号判別の時間短縮
2. すべてのポストを確実に発見する
の2点である。1の実現のため、白線センサを用いたポストのテープカウント機構の実現を目指す。また、2の実現のため、もっとも広範囲でポストを探索する「フィールド周回型」を選び、併せてプログラムの簡略化を目指す。
一度目の競技では発見したポストすべてに接近・判別し、発見した順番とポスト番号を関連付けて記憶する。ただしこの方法では同じポストを複数回発見してしまう可能性があるが、この先ソフトウェアを改良しながら解決していく計画である。とりあえずは重複をしてでも全てのポストが発見できるプログラムを開発する。
二度目の競技でも同じようにフィールドを周回するが、一度の記憶を元に順番どおりのポストのみに接近し、時間の無駄をなくす。
② ハードウェア
<コンベア>
ポスト番号判別用に本体前方に設置する。白線センサを1つ、タッチセンサを1つ、モータを1つ搭載し、FPGAにより、マザーボードからの入力のみで一連の動作をすべて実行するようにする。よって全体としての入力はタッチセンサ、出力は白線センサとなる。一番上のテープの少し上から判別を開始して最大5本のテープを確認するまで読み取る値は10個。それぞれの出力に対して1~5の数字を対応させる。
コンベアは試作品を製作中のため、詳細は詳細設計書に譲る。
<超音波センサ>
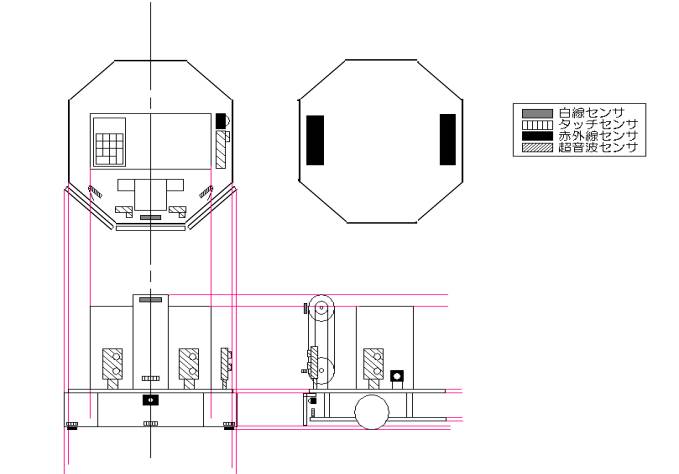
ポスト探索用 … 本体左側に1つ。余分なポストまで発見してしまわないように探索できる範囲を120cm程にする。フィールド中央にポストが置かれないとすれば、十分フィールド全体を探索できるはずである。
ポスト正面補正用 … ポスト接近時、まっすぐポストの正面を向くための補正に使う。標準機のとおり。
<白線センサ>
ポスト番号判別用 … 本体前方にせり出したコンベアに取り付けられる。実験の結果、2cmほどまで接近すれば白黒がはっきり判別できることがわかったので、距離と速さを調節していく。コンベア機構については上記。
白線トレース用 … 本体下部に3個設置する。センサ3つでフィールドを左回りに周回するために設置位置を工夫する。位置については図を参照する。
<赤外線センサ>
ポスト獲得動作用 … 標準機のとおり。
<タッチセンサ>
ポスト獲得及び障害物感知用 … 本体前方に3つで後方には付けない。標準機のとおり。
ポスト番号判別動作用 … コンベアの動き出すタイミングを得るため、本体前方(コンベア上方)に設置。
③ ソフトウェア
MIRS0601では外周を周回し、超音波センサを用いることによって、ポストを発見する。
ポストの判別は、白線センサを利用して判別する。
よって、ポストの探索、接近、補正、獲得の動作は、MIRS標準プログラムを用いる。
実際の行動制御の関数として使用するもの
l main
l initialize
l post_search
l post_approach
l correct_direction1
l correct_direction2
l irs_code_get ・・・白線センサでの判別に失敗した場合
l uss_get
2、動作概要
1、 後退して白線を感知したら90度回転
2、 白線に沿ってポスト探索
3、 ポストを発見したら位置を記憶し、ー90度回転してポストに接近
4、 補正をかけ、判別部のタッチセンサが反応したら停止し、判別を行う
5、 ポストを獲得し、元の位置まで戻る
6、 ポストをすべて獲得したら終了(周回数は3/4周を予定)
7、 二回目のときは、記憶したポストの番号順に獲得する
3、フローチャート
新しく加える白線トレースやポスト判別のプログラムのフローチャートをのせる。
<後退動作モード>
<周回動作モード>
<獲得動作モード>
<判別動作モード>
④ 概観
![]()
![]()
![]()
2.機能・性能
MIRS0601の基本ハードウェアはMIRS標準機に準ずる。以下にはMIRS0601のシステム要求を実現するための変更点のみを述べる。
① ハードウェア
・コンベア
モータ、タイヤ、ゴムベルトを用いて白線センサを上下に動かす機能。寸法・材料など詳細については未定だが、検討の結果高さ200mm弱、幅32mmほどになる予定。
・タッチセンサ
コンベアに装着する。
・白線センサ
コンベアに装着する。ポストとの距離が2cm以下になるように位置を調整。
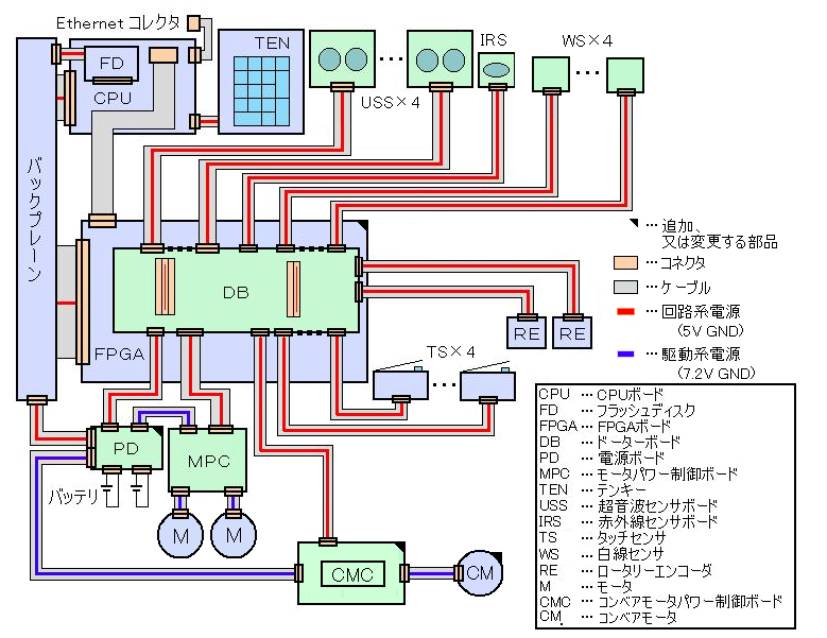
・FPGAボード
標準機に追加して以下の機能を実現する。
1、 白線センサ信号の処理
2、 コンベアのモーターパワー制御信号の処理
・ドーターボード
標準機に追加して以下の機能を実現する。
1、FPGAボードから送られてくるコンベアモーター用信号をCMCボードへ伝送する。
ただしボード自体は標準機のものをそのまま使用する。
3.実現方法
① ハードウェア
・
コンベアによる番号判別の時間短縮
→機構本体はすでに製作を開始。ギア比、モータ出力なども含め早期の完成を目指す。同時進行でFPGAボードも作成しドーターボードとの兼ね合いも見ていく予定。
② ソフトウェア
・ 全てのポストの確実な発見及びプログラムの単純化
→ポストを複数回、発見してしまうのは考えていた当初からわかっていたが、プログラムにより1回だけ発見できるようにする方法を検討中。