MIRS0601 システム提案書 |
MIRS0601-DSGN-0001 |
|
版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
|
A01 |
|
平口 |
平口 |
初版 |
|
|
|
|
|
|
|
|
|
|
|
|
1、
設計コンセプト
我がチームは白線センサによってポスト番号の判別を行う機構を用いる。これによりポストを周回する動作を省くことができ時間の大幅な短縮を実現する。
フィールド外枠の白線をトレースして外側からポストを探索する(フィールド中心で回転してポストを探索する方式はポストを見つけられない可能性があるため)
座標によってポストの位置を表す方法は取らず、フィールドを反時計回りに周回してどのポストが何番目だったかということを記憶することによって、アルゴリズムの単純化を実現する。
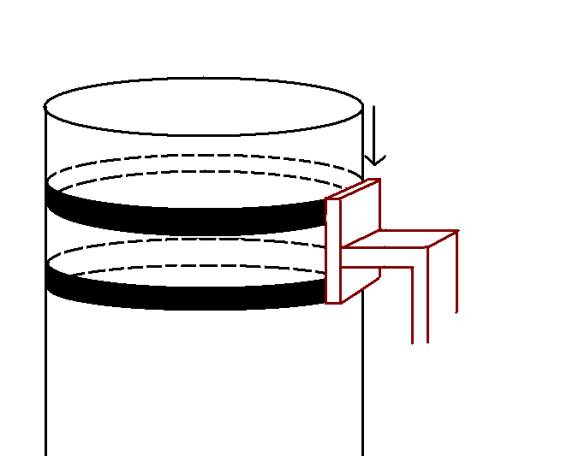
ポストの判別は、MIRS前方の白線センサをモータにより上下させてポストに付けられている黒テープの数を数えることで行う。
ポスト獲得時には、動作終了を示す合図となる音を発する。
一回戦では、フィールドを何回か周回し順番通りにポストを獲得することを目標とする。
二回戦では、一回戦目での記憶を元に、ポスト番号順に獲得する。
トラブルが起き目標が達成されなかった場合、確実に補足動作を行えるようにする。
―起こりうるトラブルとして以下の事項を挙げるー
1、当日の光の加減によりポストのテープが白線センサで読めない
→→判別動作を二回行い、それでも読めない場合は獲得動作に移行する。正面を向いた際に赤外線信号によってポスト番号を確認する
2、ポストが外側にありすぎてライントレースではMIRSの進行を妨げてしまう場合
→→ポストにぶつかるときに前方のタッチセンサが感知するので内側によけて進む動作を行う。
3、
ポストに接近したときにスイッチが正面にあった場合
→→前方の赤外線センサが信号を感知するので、白線センサでの判別は行わず、なおかつ近づきすぎてスイッチを押してしまうことを防ぐ。
2、
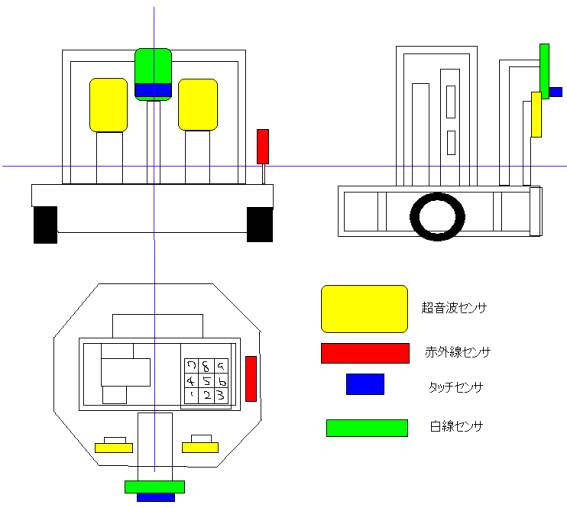
1ハードウェアの特徴
白線センサによるポスト判別機構
→→モータをもうひとつ搭載する(モータ:マブチ RE-260を使用予定)
白癬トレース用に本体下部に白線センサを3つ設置する。(前方に左右1つずつ、後方に右側1つ)
超音波センサは正面に2つと、ポスト探索用に左側に1つ。
赤外線センサはポストスイッチ探索用に正面に1つ。
2、 2ソフトウェアの特徴
座標の概念ではなく、外周する際にポストの通過回数をカウントする。座標を用いるときに発生する誤差(基準点からのずれ)がなくなる。
本体前方のタッチセンサがONになるとポスト判別機能のモータがONになる。
周回動作、獲得までの動作は標準機搭載のプログラムに順ずる。
3、 動作概念
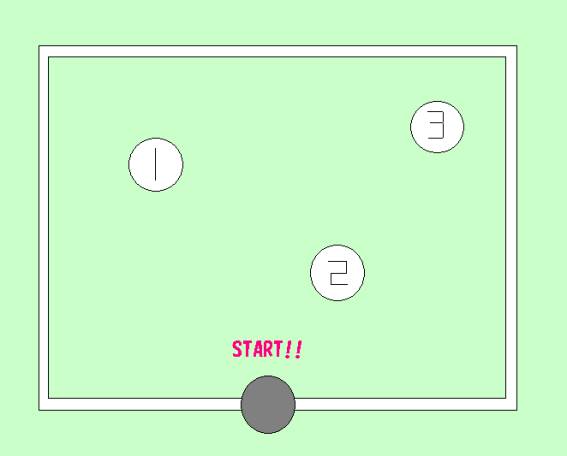
スタートして、まず白線まで下がり90度時計周りに回転してトレースを開始する。
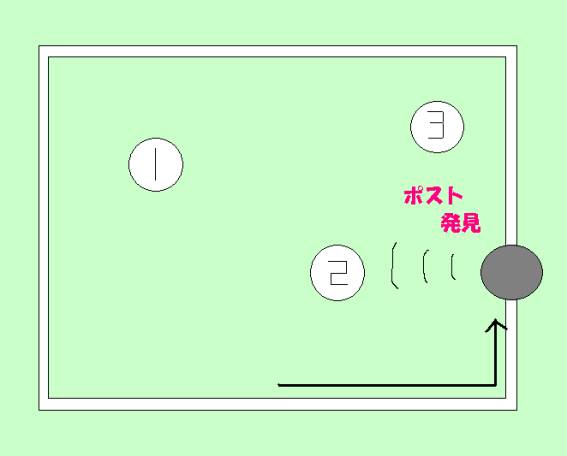
本体左の超音波センサでポストの探索を行い、ポストを発見するたびに、カウントをプラス1する。
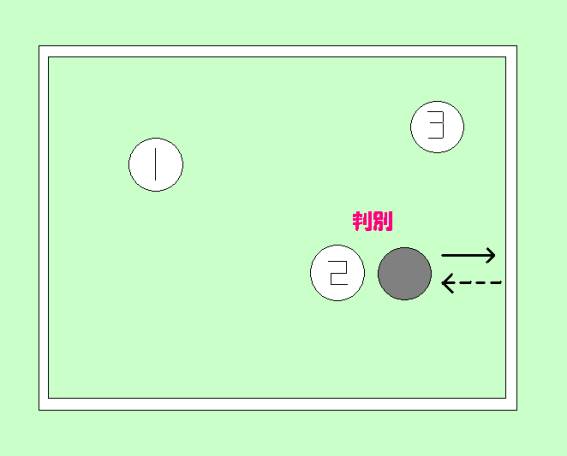
発見するたびにポストに接近し、白線センサでポスト番号を判別する。
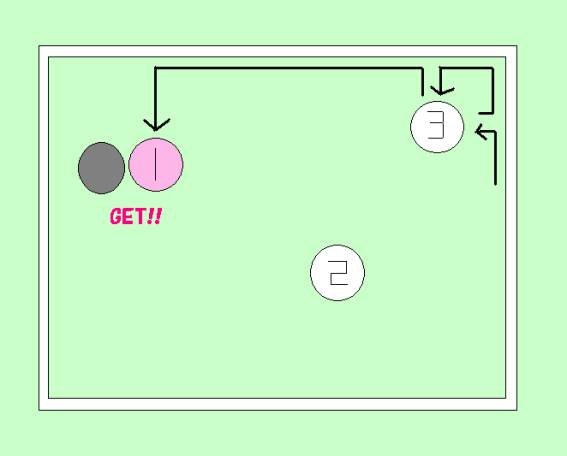
獲得すべきポストであったら、獲得動作を行いそのときのカウントの値を記憶する。
ポストを周回し終わって、外周の白線に戻りトレースを続行する。
以上の動作を繰り返し、順番通りにポストを獲得する。
4、 システム外観