|
沼津高専 電子制御工学科 |
||||||
|
||||||
|
改訂記録 |
||||||
|
版数 |
作成日 |
作成者 |
承認 |
改訂内容 |
||
|
A01 |
2005/09/02 |
遠藤・曽根 |
今井 |
初版 |
||
|
A02 |
2005/09/12 |
遠藤・曽根 |
〃 |
諸不備の訂正 |
||
|
A03 |
2005/09/16 |
遠藤・曽根 |
〃 |
〃 |
||
|
A04 |
2005/09/19 |
遠藤・曽根・今井 |
〃 |
動作概要、カメラなどの説明変更 |
||
|
A05 |
2005/09/21 |
遠藤・曽根・今井 |
〃 |
基本動作の変更 |
||
目次
- はじめに
- システム概要
- システム要求(動作概要)
- ハードウェア
- ソフトウェア
- 外観
- 機能・性能
- ハードウェア
- ソフトウェア
- 実現方法
- ハードウェア
- ソフトウェア
- 両者を用いて実現する事項
1.はじめに
本設計書では、MIRS0505のシステム提案を実現するために必要とされる基本的な機能を定義し、その機能を実現する方法を記載する。
2.システム概要
2.1.システム要求(動作概要)
a. システム要求
・ ポストの確認を遠距離からできる。
・ カメラの効率的利用
・ MIRS標準機において考えられる問題点を改善し、精度の高い動作を目指す。
b. 動作概要
◇第一案(最終的な目標とする動作)
一周目の動作
1.スタート位置から前進、その際に両サイドから超音波センサでポストを探索する。
2.ポストを発見し、MIRSからポストまでの距離がカメラの守備範囲内(現状では50〜100cm程度になると考えている)ならば、停止し、ポストをカメラで撮影、ポスト番号を認識する。この際、ポストからMIRSの距離が近すぎた場合は、少し前進又は後退し、MIRSとポスト間の距離を無理やり50〜100cm程度にする。逆に、MIRSとポストの距離が離れすぎていた場合は、進行方向からポストに向かって90°回転し、MIRSとポストの間の距離をカメラで撮影し、その番号を識別する。ここでもし1番ポストを発見した場合はポスト獲得動作に移り、獲得後ポスト探索軌道に復帰する。1番ポストではなかった場合は、そのまま軌道上を前進し、次のポストを探す。基本的にはこの繰り返しである。
3.フィールドの端の白線までたどり着いたら、白線センサを用いて場外を防ぎ、折り返す。
4.折り返したら、一通り全てのポストの位置を取得しているので、今度はポストを順番どおりに獲得していく。
5.スタート位置から真正面にポストがあった場合は、左右に少し移動し、MIRSが一直線に進める道を探す。
二周目の動作
基本的に一周目と同様だが、今度は座標をとってあるので、初めから順番に獲得していく。
2.2.ハードウェア
MIRS0505の基本ハードウェアはMIRS標準機に準ずる。MIRS0505のシステムのハードウェアの標準機からの仕様変更点を以下に述べる。
◇ モノクロカメラの搭載
◇ DC-DCコンバータの搭載
◇ アナログデジタル変換機
◇ 超音波センサを右方に一つ追加
2.3.ソフトウェア
MIRS0505の基本ソフトウェアはMIRS標準機に準ずる。以下にはMIRS0505のシステム要求を実現するための変更点のみを述べる。
◇ MIRS0505ではモノクロカメラを搭載し、それによりポスト番号を識別するので、カメラからのデータを解析し、ポスト番号を識別するプログラムを標準機のプログラムに加える必要がある。
◇ 進行方向にポストがある場合の回避動作を加える。
◇ ポスト獲得数を4〜5個に対応できるように変更する。
◇ 標準動作も標準機とは大きく異なるので、プログラムを総入れ替えする必要がある。
2.4.外観
MIRS0505の概観を以下に示す。
外観図
3.機能・性能
3.1.ハードウェア
MIRS0505の基本ハードウェアはMIRS標準機に準ずる。
以下にはMIRS0505のシステム要求を実現するための変更点のみを述べる。
○ モノクロカメラ
MIRS0505のポスト番号確認に使う。だいたい最大1メートルくらい離れた
位置からのポスト番号確認を可能にしたい。
○ DC-DCコンバータ
モノクロカメラの動作に必要な電圧を得るために使う。
○ アナログデジタル変換器
カメラからのアナログデータをデジタルデータに変換するのに使う。
○ 超音波センサ
標準機に加え、右方に一つ超音波センサを追加する。
○ その他搭載センサ
標準機よりも高い精度を得られるようにする。
3.2.ソフトウェア
MIRS標準機用に用意されたカーネルモジュールとデバイスドライバを使用する。下の表に使用するデバイスドライバを示す。
table1:使用するデバイスドライバ
|
デバイスドライバ |
|
赤外線センサ |
|
タッチセンサ |
|
赤外線のコード判別 |
|
超音波センサ |
|
LCD |
|
PWM |
|
ロータリーエンコーダ |
4.実現方法
4.1.ハードウェア
○
接続図
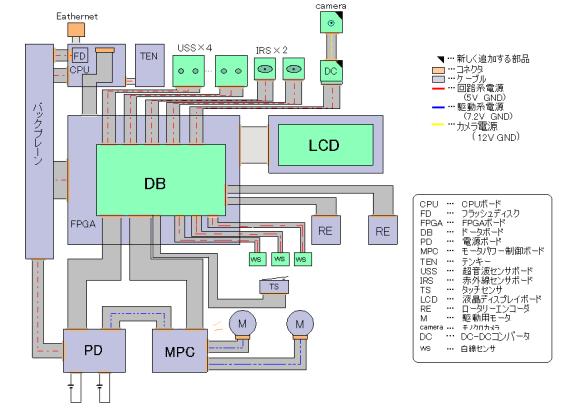
○ モノクロカメラ
仕様:
◆画角 80°
◆有効画素 512H×492V
◆最低被写体照度 1.5カメラからのアナログデータをデジタルデータに変換するのに使う。カメラからのアナログデータをデジタルデータに変換するのに使う。
Lux以下F3.5
◆水平解像度 300TV本
◆オート電子シャッター 1/60〜1/10000秒自動制御
◆映像出力 NTSC準拠コンポジットビデオ出力1.0Vp-p/750
◆電源 DC12V120mA
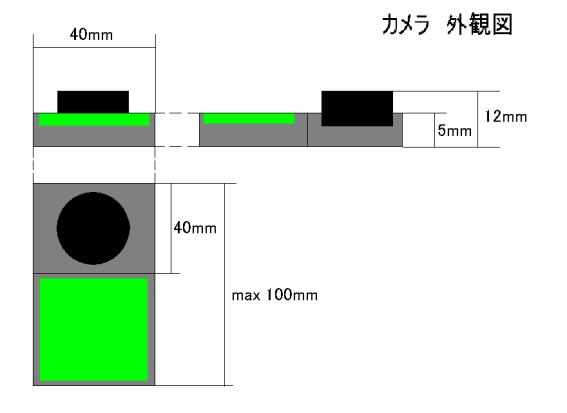
◆外形寸法 CCD部35×40mm、電源部35×40mm
カメラ概観図
※カメラの利用方法※
本来使うカメラと類似したカメラを利用してデータを取ったところ、オシロスコープにて比較的鮮明に白黒の波形が出ることが確認された。また、ポストから1m程離れていてもポスト番号を確認することができ、ソフトウェア次第で近接しなくてもポスト番号を認識できることが現在の調査でわかっている。つまり、当初は遠距離からのポスト判別はその他の背景なども影響が出ると考えられ不可能だと思われたが、50〜100cmの距離があっても周波数をパターン化して解析しそれをミルス本体のプログラムで認識できるようにすれば今回のカメラを使ったポスト取得は可能であるといえる。
○ DC-DCコンバータ
仕様:
■標準24V入力,12V 2A出力(出力5〜20Vで可変可能)
■スイッチング・タイプで高効率・低発熱
◆非アイソレーテッド(GND共通)
◆出力:12V 2A
◆入力:出力電圧+3V以上必要
◆外付け抵抗で出力5V〜20V可変
◆外形寸法:39(W)x27(D)x25H(mm)
○ アナログデジタル変換器
カメラからのアナログ出力をFPGAで制御するためのデジタル信号に変換するコンバータ。
アナログ出力の波形に出てくるノイズを除去し、信号をデジタル化したときに値が明確になるようにする。
○ 超音波センサ
標準のものを前方と左方と右方に計四つ使用する。
○ 赤外線センサ
前方と左方に計二つ使用する。
4.2.ソフトウェア
- ポスト獲得数の変更
ポスト獲得数が指定したポスト数に達するまで、一連の動作を行う。
- タッチセンサ
ポスト獲得時に、ポストのスイッチの押下を確認するためにタッチセンサを利用する。ポスト獲得時は、タッチセンサの入力があるまで前進する。
- 基本動作プログラムの変更
プログラムは動作概要に依存する。
- ポスト確認プログラムの追加
ポストのラインの本数をカメラで撮影し、カメラから入ってきたアナログデータをアナログデジタル変換器でデジタル化し、そこからポスト番号を示すデータを抽出するプログラムを加える。
|
関連ドキュメント |
||
|
ドキュメント番号 |
ドキュメント名称 |
作成責任者 |