|
沼津高専 電子制御工学科 |
||||||
|
||||||
|
改訂記録 |
||||||
|
版数 |
作成日 |
作成者 |
承認 |
改訂内容 |
||
|
A01 |
2005.11.17 |
松川 |
大木 |
初版 |
||
|
A02 |
2005.11.18 |
松川 |
大木 |
図面の改訂。取り付け説明を追加 |
||
1.ガイドLの取り付け
アーム固定用プレートの指定された場所に下図のような向きで取り付ける。
ねじはM2なべ小ネジ3mmを使用する。ねじは各ガイドごとに2本ずつ使用する。
2.ガイドSの取り付け
アーム固定用プレートの指定された場所に下図のような向きで取り付ける。
ねじはM3なべ小ネジ3mmを使用する。ねじは各ガイドごとに2本ずつ使用する
3.モーター部の取り付け
組み立てが終わったモーター部のモーター取り付け金具を、
アーム固定用プレートの指定された場所に下図のような向きで取り付ける。
モータマウント接続L字金具の穴に上からM3なべ小ねじ5mmを使用する。
ねじは2本使用する
4.アームフレームの取り付け
組立が終わったアームフレームを下図のような位置に置く。
5.モーターの取り付け
モーターマウントのしるしに合うようにモーターを合わせる。
このときモーターをアームフレームがある方向に先端(駆動部)がくるようにする。
外側からM3なべ小ねじ5mmを使用してモーターを固定する
ねじは3本使用する。
なお、モーターのほうにはすでに3つの穴があけられている状態で、
市販されているので新たに穴をあける必要はない。
6.タッチセンサの取り付け
タッチセンサ取付穴にタッチセンサを取り付ける
タッチセンサ1個につきM2なべ小ネジ10mmを2本使用し、タッチセンサは3つあるのでねじは6本使用する
gif.1 アームユニット図面
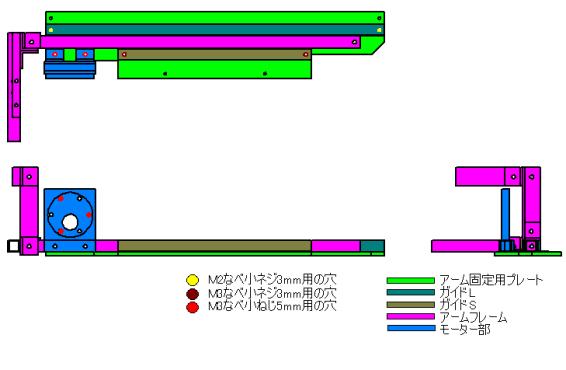
gif.2 アームユニットの部品構成図
gif.3 アームユニット取り付け位置
gif.3の赤丸の部分とgif.2のアーム固定用プレートの無印の穴の位置を合わせて取り付ける。このときねじはM2なべ小ねじを使用する。
|
番号 |
品名 |
ドキュメント番号 |
E/C |
材料 |
個数 |
備考 |
|
1 |
アーム固定用プレート |
MIRS0504_MECH_0015 |
E |
|
1 |
|
|
2 |
ガイドL |
MIRS0504_MECH_0016 |
E |
|
1 |
|
|
3 |
ガイドS |
MIRS0504_MECH_0017 |
E |
|
1 |
|
|
4 |
アームフレーム |
MIRS0504_MECH_0018 |
E |
|
1 |
|
|
5 |
モーター部 |
MIRS0504_MECH_0019 |
E |
|
1 |
|
|
6 |
タッチセンサ |
|
E |
|
3 |
|
|
7 |
なべ小ねじ |
|
E |
|
|
|
|
8 |
蝶板 |
|
E |
|
1 |
|
|
9 |
バンパープレート |
MIRSSTND-ASMY-0004
|
E |
|
1 |
|
|
|
ねじ |
|
E |
|
|
|
|
|
リングワッシャ |
|
E |
|
|
|