|
������ �d�q����H�w�� |
||||||
|
||||||
|
�����L�^ |
||||||
|
�Ő� |
�쐬�� |
�쐬�� |
���F |
�������e |
||
|
A01 |
2005.09.02 |
��� �� |
��� �� |
���� |
||
|
A02 |
2005.09.09 |
��� �� |
��� �� |
�ڍׂ�s��������lj� |
||
|
A03 |
2005.09.13 |
��� �� |
��� �� |
�ڍׂ�s��������lj� |
||
|
A04 |
2005.09.15 |
��� �� |
��� �� |
�\�t�g�E�F�A����T�v�}��lj� |
||
|
A05 |
2005.09.16 |
��� �� |
��� �� |
���͂̍\�������� |
||
�ڎ�
�P�D �͂��߂�
�Q�D �V�X�e���T�v
�R�D �@�\�E���\
�S�D �������@
�P�A �ړI
�ŋ߂̃��{�b�g�̐i���iprogress�j�͖ڊo�����AMIRS�iMicro Intelligent Robot System�j�����̔ɉh���A1995�N�Ɏn�܂���MIRS���Z���2002�N�ɂ͋��Z����Ă����ǂ���蕥���A���A�l����������D�Ȃ̐擪�ɂ����A�V���Ȃ���j����낤�Ƃ��Ă���c�B���܂ł̋P����������̗��j������Ă�����y���ɒp���Ȃ��悤�Ȋ��l�����Ɋ��҂���Ă���B
�{�d�l����MIRS���Z�K��Ɋ�Â��AMIRS�̊�{�d�l���L�q����B
�Q�A �V�X�e���T�v
�Q�C�P�@�V�X�e���v��
�J�n�n�_���璴���g�Z���T���g���A��]�^�����Ȃ���Ŋ�̃|�X�g��T���B�������|�X�g�Ƃ���B��|�X�g������^�����Ȃ���A�ԊO���Z���T�Ŋ�|�X�g�̔ԍ��ƁA�����g�Z���T�ő��̃|�X�g�̈ʒu�ׂ�B���̎��Ƀ|�X�g�̐���S���m�F���邱�Ƃ��ł��Ȃ�������A�ʂ̃|�X�g����|�X�g�ɂ��A������������B�S�Ẵ|�X�g�̈ʒu���m�F������O�x�̃|�X�g�����肷��B��|�X�g����ԂłȂ��ꍇ�A�ʂ̃|�X�g�̔ԍ����m�F����B�ԍ��̊m�F�͔����Z���T�𗘗p���A�|�X�g�̃��C����ǂݍ���Ŕ��f����B��Ԃ̃|�X�g�������������^�����A�ԊO���Z���T�𗘗p���ă{�^���̈ʒu���m�F����B�{�^������������A�[�����g���A�{�^���������B��͓���������J��Ԃ��A���ԂɃ|�X�g���l�����Ă����B
�Q�C�Q �T��
�R�A �@�\�E���\
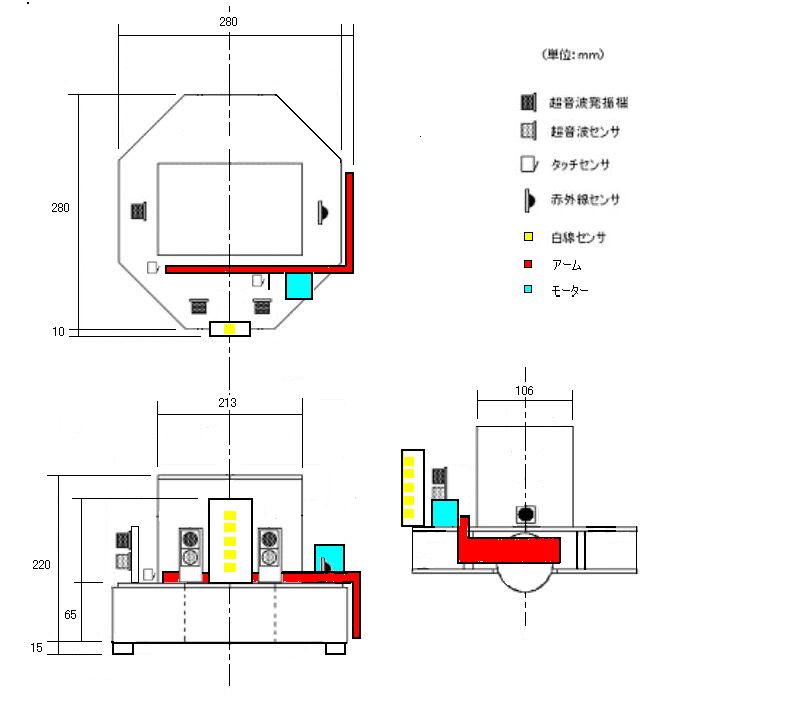
3.1�@�n�[�h�E�F�A
o �V�X�e���̊T�v
�u�ԊO���Z���T�v
�ԊO���Z���T�́A�|�X�g�̃{�^�����甭�M����Ă���ԊO�������m���邽�߂Ɏg�p����B
MIRS�̍����Ɉ����B���̃Z���T�́A�|�X�g�̃{�^���̈ʒu�ƃR�[�h���ʂƃ{�^�������������̔��ʂ̂Ƃ��Ɏg�p����B
�u�����g�Z���T�v
�����g�Z���T��MIRS����|�X�g�܂ł̋����𑪂�B
�����g�Z���T��MIRS�@�̂̑O���ɓ�A�����Ɉ����B
�O���ɂ��钴���g�Z���T�̓|�X�g�Ƃ̋�������Ƃ������l�ɂȂ��ă|�X�g�ɑ����ʂ������Ă��邩���f�����邱�Ƃ�����B
�����ɂ��钴���g�Z���T�̓|�X�g�̎���^������ۂɁA���̋�����ۂĂ�悤�ɂ���B
�u�����Z���T�v
�����Z���T�͂T���ڂ���B�|�X�g�̃��C���̊m�F�Ɏg�p����B
�u�^�b�`�Z���T�v
�^�b�`�Z���T�͑S���łR�g�p����B
��̓A�[���̐�[�ɂ��A�{�^�������������ǂ������ʂ���ۂɎg�p����B
��ڂ̓A�[�����L�т���Ȃ��悤�ɂ��邽�߂Ɏg�p����B
�O�ڂ̓A�[����߂����������ǂ����f�����邽�߂Ɏg�p����B
�u�d�q�R���p�X�v
��|�X�g��������Ȃ��悤�Ɏg�p����B
�g�p����d�q�R���p�X��360�x��8�����ʂ��邱�Ƃ��ł���B
2�i3bit�̐M�����o�͂���
�u�A�[���v
���@�\��
�E�|�X�g���l������Ƃ��ɐ�����덷�����Ȃ����邽�߂ɁA�|�X�g���班�����ꂽ�ꏊ����|�X�g���l������B
���̋@�\���u�A�[���v�Ƃ���B
�E�A�[���̐L�т钷����200mm�A�|�X�g�l����A�[�����L�т������Ɣ��f�����邽�߂Ƀ^�b�`�Z���T��3�g���B
�E�^�b�`�Z���T��
�@ �A�[���̐�[
�A �A�[���̃X�g�b�p����(���̓��[�^�ƃX�g�b�p���ڐG����ꏊ)
�B �A�[�����k�݂������Ƃ��ɐڐG���镔���A�ɐݒu����B
�@ ����чA��ON�ɂȂ����Ƃ��̓��[�^��]���t�]������B���̌�ɇB��ON�ɂȂ����烂�[�^��]���~������
�L�т钷����200mm
���@�\��
�E�����_(10�~10�~280�̊p�p�C�v��\��)�ɃS���x���g�𗼖ʃe�[�v�ŌŒ肵�����̂����b�N�̑�p�i�Ƃ��Ďg�p�B
�E���[�^�̓^�~��540���[�^��75�F1�M�A�w�b�h�g�p(�͕s���ł����300�F1�A�\�����������x���悤�ł����30�F1���g�p)
���[�^�Ɏ��Ԃ����t���ČŒ�A���Ԃ����Ƃɂ��x���g�ƃM�A�����ݍ����A
����ɂ�胂�[�^�����]����A�[�����L�сA�t�]����A�[�������̏�Ԃɂ��ǂ�B
�E��[�Ɋւ��Ă�MIRS�̃o���p�[�̂悤�ȍ\��(�^�b�`�Z���T�[�̑O�ɏ�[���Œ肵���A�N�����̔����t����)�B
�܂��A����邱�Ƃ�z�肵�ăK�C�h������B����ɂ����悤�ł�����[���[�����t���đΉ�����B
���g�p���郂�[�^�̎d�l��
|
540K75 |
|
|
���d���d��7.2V |
|
|
��������]�� |
221rpm |
|
����������d�� |
1.2A |
|
�ő�������̃g���N |
12kg�Ecm
(6.32A/185rpm) |
|
�d��=��270g�@DC12V�܂Ŏg�p�\�ł��B |
|
3.2�@�G���N�g���j�N�X
���ɁA�����504�ǂ̃G���N�g���j�N�X�̃u���b�N�}�������B
�V�K�ɒlj�����̂́A�M���ϊ���H�E�d�q�R���p�X�iEC�j�E�p���[����{�[�h�iPC�j�E�A�[���iA�j�ł��B
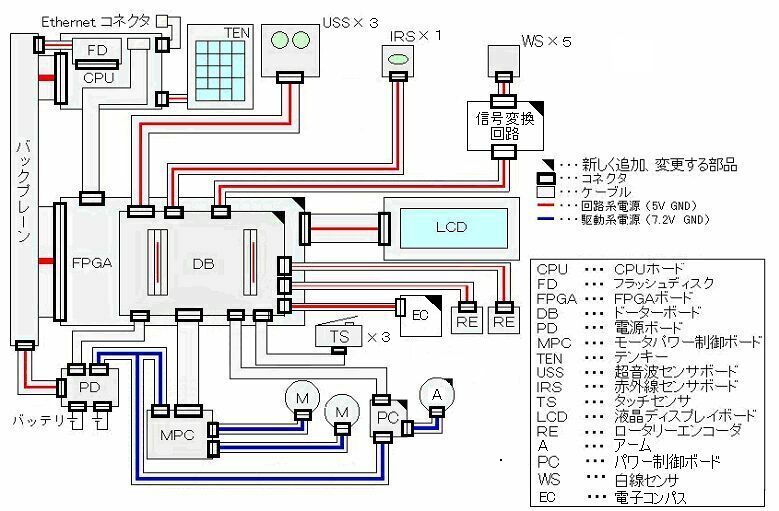
�d�q�R���p�X�{�[�h�iEC�j
MIRS�������Ă�����p������3bit�̐M�������ďo�͂���B
���d�q�R���p�X�̊T�v��
���o�͕\��(TTL�܂���CMOS�݊��o��)
|
|
N |
NE |
E |
SE |
S |
SW |
W |
NW |
|
D0 |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
1 |
|
D1 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
1 |
|
D2 |
1 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
���d�l��
|
���x |
�} 5�� |
|
�X���e�p |
�}10�� |
|
�Z�g�����O�^�C�� |
500ms (max) |
|
�q�X�e���V�X |
�}5�� |
|
�d���d�� |
DC5V�}10�� |
|
�d���d�� |
12mA (max) |
|
�o�͓d�� |
VL=0.6V (max), VH=Vs-0.6V
(min) |
|
�o�͓d�� |
5mA (max) |
|
���쉷�x�͈� |
-5�� �` +60�� |
|
�ۑ����x�͈� |
- 25�� �` +75�� |
|
�T�C�Y |
26.5mm �~ 26.5mm �~ 5 mm |
�����Z���T�M���ϊ���H�{�[�h
5�̔����Z���T�𓋍ڂ��邽�߁A�W���ł�5bit�̐M�����o�͂����B
�����8to3�̃G���R�[�_IC�@74148�@��p���ĉ�H��v���A3bit��2�i���o�͂ɕϊ�����B
FPGA�{�[�g�ɂ�����M�����͂�2bit���ߖ�ł���B
�A�[���̃��[�^����p��H
FPGA�{�[�h�ɘ_����H������āA�P���߂ŃA�[�����L�тďk�ޓ��������悤�ɂ���B
���[�^�̐���ɂ��ẮAMPC�{�[�h�̊ȈՔł̂悤�Ȋ����ŁA�ϑ��@�\�Ȃǂ͂��Ȃ���Ղ��쐬����B
���A�[���̐��䁄
�����[��H���g���A1bit�̖��߂Ń��[�^�[�̐���]�t��]�𐧌䂷��B
�^�b�`�Z���T���ꏏ�ɓ��ڂ��邱�ƂŁA���o�͂��킹��2bit�Ő��䂷��B
�d���͋쓮�n���狟������B
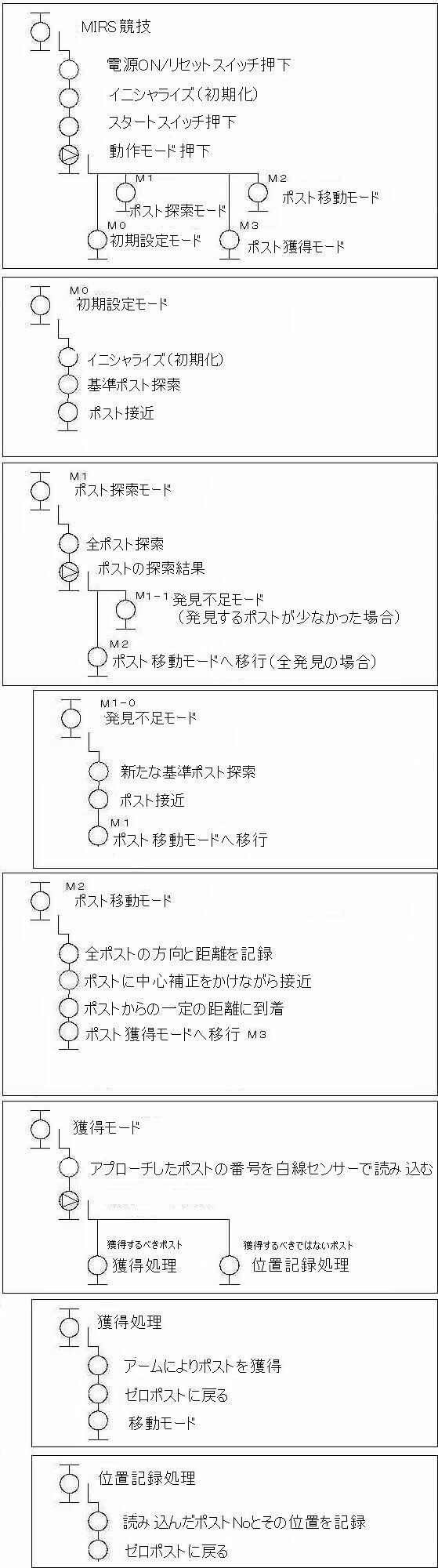
3.3�@�\�t�g�E�F�A
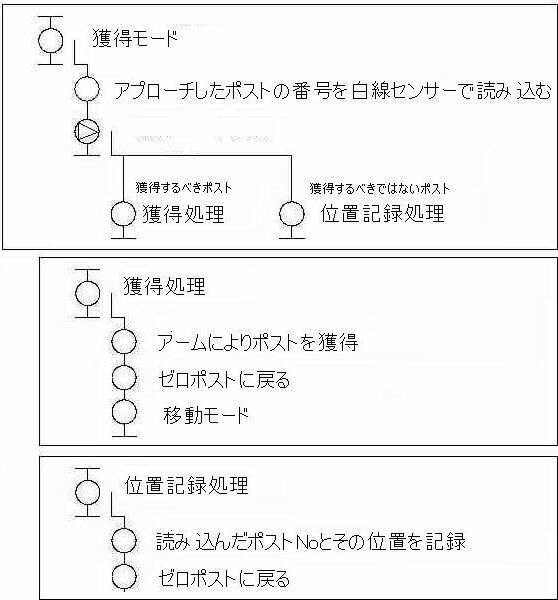
3.3.1�@���[�h�̐���
�����ݒ胂�[�h
��|�X�g�������[�h�B
�X�^�[�g�ʒu�Œ����g�Z���T��p���ă|�X�g��T���B
�������炻�̃|�X�g�ֈړ����Ă��̃|�X�g����ق��̃|�X�g��T���B
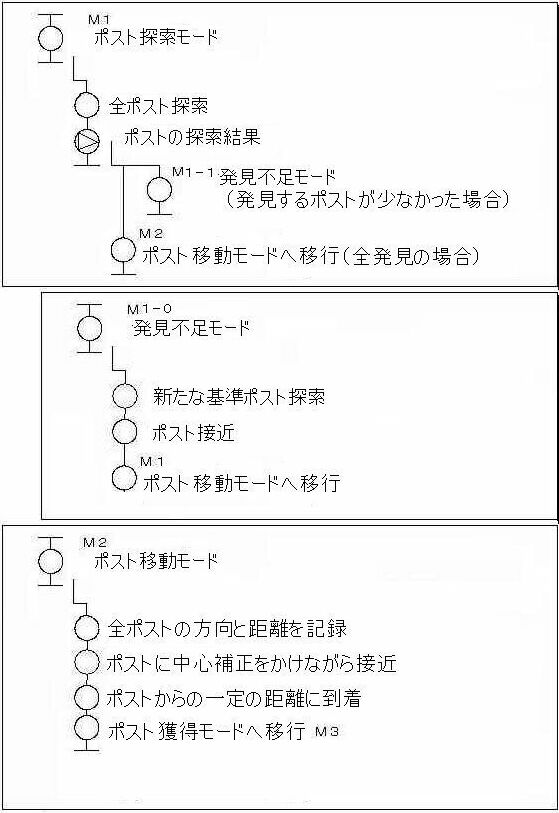
�|�X�g�T�����[�h
��|�X�g����ق��̃|�X�g��T�����A���̂Ƃ��Ɋp�x���f�[�^������Ă����B
�|�X�g�ړ����[�h
������ς��ă|�X�g�����ɂ����B
�����Z���T�Ń|�X�g�ԍ���ǂݍ���ŁA���ׂ��|�X�g�Ȃ�|�X�g�l�����[�h�ցA�����łȂ���Ί�|�X�g�֖߂�B
�|�X�g�l�����[�h
���ׂ��|�X�g��������A���̃|�X�g�̎�����ړ����ĐԊO�����o�Ă���ʒu��T���B
���������炻�̏�Œ�~���A�[����L���ă{�^���������B
3.3.2 ���샂�[�h�̊T�v
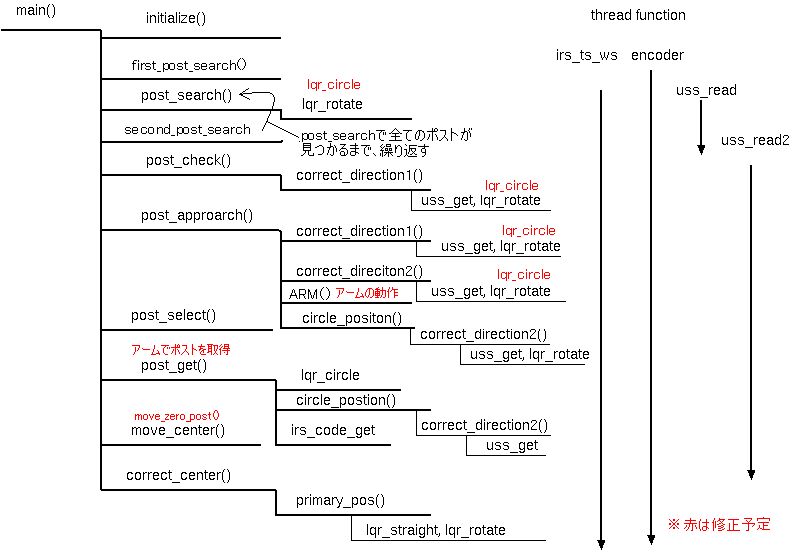
�� 2��ڂ̓���ɂ���
���ڂ́A1��ڂ̋��Z�œ����A��|�X�g�̃f�[�^�E�d�q�R���p�X��
�p�x��0�x�Ɏw�肷��̃|�X�g�̃f�[�^���Ƃ炵���킹�A�ɉ�����
�|�X�g�l���܂ł̎��Ԃ̒Z�k����}��
3.3.3�@���Ǔ_
�E �ԊO�Z���T�̓�������ɂ܂Ƃ߂�
�E �����Z���T�̃|�X�g�̃��C���m�F��t��������
�E �^�b�`�Z���T�����[�^�[�̓����ɘA��������悤�ɂ���
�E ���[�^�[�����t��������
�E ��|�X�g�����߂Ăق��̃|�X�g�̈ʒu���m�F����B
�S�Ẵ|�X�g�̈ʒu���m�F���邱�Ƃ��ł��Ȃ�
�Ƃ��͕ʂ̃|�X�g����|�X�g�ɂ���悤�ɂ���B
�d�q�R���p�X�𗘗p���ĕ��p�����|�X�g��������Ȃ��悤�ɂ���
�E �|�X�g�l���̍ۂɃA�[���łƂ�ɍs���悤�ɂ���
3.3.4�@�h���C�o�ɂ���
��
TS,�d�q�R���p�X�A�����Z���T�A�ԊO���Z���T�̃f�o�C�X�h���C�o��IO�A�h���X��140�Ԃ��g�p����
TS�f�o�C�X�h���C�o
�@�\�F�^�b�`�Z���T�̓��͐M���̓ǂݍ���
bit:0
�A�[���f�o�C�X�h���C�o
�@�\�F�A�[���̎n�����߁A�I���m�F
��IO�|�[�g�ԍ�100�Ԃ�0bit�ڂ��g��
�ԊO���Z���T�f�o�C�X�h���C�o
�@�\�F�ԊO���̗L���̊��m
bit:5
�d�q�R���p�X�f�o�C�X�h���C�o
�@�\�F�d�q�R���p�X�̕��p�f�[�^���擾����B
bit:6�`8
�����R�[�h�ǂݎ��f�o�C�X�h���C�o
�@�\�F�����̊��m�Ɣԍ��̓ǂݍ���
bit:9�`11
����ȊO�̃f�o�C�X�h���C�o�͕W���@�̂��̂��g�p����B