|
沼津高専 電子制御工学科 |
||||||||
|
||||||||
|
改訂記録 |
||||||||
|
版数 |
作成日 |
作成者 |
承認 |
改訂内容 |
||||
|
A05 |
2005.7.27 |
天野 |
天野 |
初版 |
||||
1.目的
標準機と異なる点について技術調査を行ったのでそれをこのドキュメントでは報告する。
2.技術調査報告
以下の点について報告する。
・ 探索方法
・ ポスト番号取得方法
・探索方法
1.
直進型
初期位置から左右に平行に動き正面にポストがない(ポストにぶつからずに直進できる)位置を探し、そこを基準線として、その位置から競技エリアを横切るように正面方向へ直進移動しながら左右の超音波センサでポストを探索する。
u
利点
・ MIRSの動きが基本的に直角・直進運動であるため、移動の誤差が少なく、正確な移動が出来る。
u
欠点
・ 初めにポストのない位置を探すときに、超音波センサの最長の測定可能距離によっては競技エリアの隅のほうにおいてあるポストを感知できない可能性がある。
2.
中心型
初期位置から競技エリアの中心に移動し、その場で回転してポストを探索する。探索後、ポストを獲得しに移動し、その後中央に戻って次のポストに移動する、という動作を繰り返す。
u
利点
・ 標準機でベースとなるプログラムを使用しているため、それを元にプログラム開発できる。
u
欠点
・ 中心に移動する際、間にポストがある場合に迂回しなければならない。
3.
ポスト周回型
初期位置から競技エリアの中心付近に移動し、その場で回転してポストを探索、一番近くのポストへ移動する。そのポストに対して周回運動しながらその他のポストを探索する。ポストを発見した場合、そのポストに移動・獲得動作を行い、その後初めのポストの周回に復帰して周回運動、を繰り返す。
u
利点
・ ポストの1つを基準として用いるため、実際に探索するポストが1つ減る。
・ 基準ポストという目標物があるので、比較的正確に基準の位置(基準ポストの周回)に戻ってくることが出来る。
u
欠点
・ 中心に移動する際、間にポストがある場合に迂回しなければならない。
・ 移動距離が長くなる可能性が大きく、時間がかかりがちになる。
4.
2点補正型
初期位置から競技エリアの中心付近に移動し、その場で回転してポストを探索後、一度後方に少し下がり、再度回転してポストを探索する。
u
利点
・ 正確にポストと自機の位置を割り出すことが出来る。
u
欠点
・ 初めに2度ポストの探索をするので時間がかかる。
・ 競技エリアの中心付近にポストがある場合、後退したときにポストにぶつかる可能性がある。
また、全ての探索方法に共通する問題として次のことが挙げられた。
問題点
u
ポスト探索の際に、MIRS本体から見てポストが重なっており、MIRSから見て後ろにあるポストを発見できない場合がある。
解決策
u
ポストの獲得動作中(ポストに対する周回運動中)に、ポストの裏側の探索を行う。
ポストの獲得動作中に、センサによって初期の探索位置から見て獲得中のポストの裏側となる方向の探索を行う。これによって、ポストの裏側にあるポストもあとから発見することが出来る。
課題
u
ポストの陰にあるポストが番号の若いものの場合、発見するまで次のポストが獲得できないため、時間が足りなくなってしまう可能性がある。
素子
探索に使用する素子として考えられるもの
1.
超音波センサ
ここで現在標準機にも使用されている超音波センサに関しては、すでに有効性が十分判明しているためここでは省略する。
2.
赤外線センサ
今回の議論で挙がった素子。
u 問題点 調査の結果、超音波センサに比べて有効距離が短め(既製品(製品名:IR600)を例にとると10~80cm)であるため、MIRS競技での使用は難しいと思われる。
よって、すでに使用している超音波センサのほうがMIRS競技に適していると考えられる。
・ポスト番号取得方法
白線センサの使用
白線センサを並べてポストの白を感知するよう4つ縦に配置し、信号として情報を取得し番号を確認する
理由
従来の方法では、赤外線センサでコードを判別するために赤外線送信部に対して正対する必要があったが、今回のルール改定によりポストにテープが巻かれることとなった。これを利用してポスト番号をどこからでも接触しても取得できるようになり、その分の時間短縮が行えると考えたからである。
外観予想図
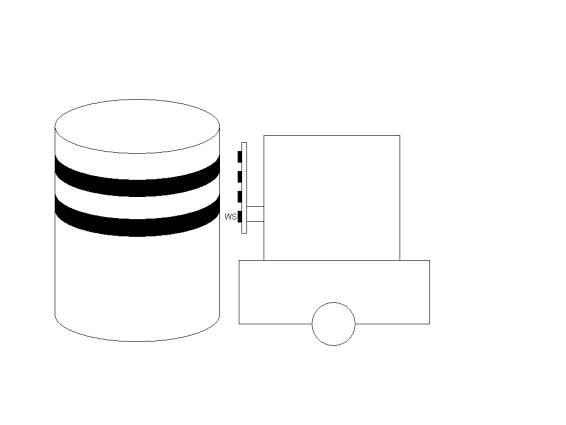
例:ポスト番号2番
所得する信号:1100(ここでの最下位が一番上についているWS)
上記のように各ポストのラインを入力としてプログラム上でポスト番号に変換しポストの番号を所得する。