|
������ �d�q����H�w�� |
||||||||
|
||||||||
|
�����L�^ |
||||||||
|
�Ő� |
�쐬�� |
�쐬�� |
���F |
�������e |
||||
|
A09 |
2005.10.14 |
�L��� |
�V�� |
���� |
||||
�ڎ�
�P�D
�͂��߂�
�Q�D
�T�v
�P�D
�O�`
�Q�D
�Z���T�n
�R�D
�d���n
�S�D
�쓮�n
�R�D
�O��
�S�D
�����c���[
�{�h�L�������g�́AMIRS0502�̃��J�j�b�N���̐����d�l���ɕK�v�Ȏ������q�ׂ��ڍאv���ł���B
MIRS0502�̖{�̂�MIRS�W���@�ɐV�K�ɓƎ��̍\����lj����邱�Ƃɂ�萻������B
�{�̂̃V���[�V�A���b�N�A�쓮���ɕύX�_�͂Ȃ��B�{�̂̑O���V���[�V�㕔�Ƀ|�[���̍����̖{���ɂ��|�X�g�̔ԍ��ʂ��邽�߂̃z���C�g�Z���T4���c�ɔz�u���邽�߂̍\����݂���B�܂��A�|�[���ɓ��������Ƃ��ɖ{�̂���~���邽�߂̃^�b�`�Z���T�����ɐ݂���B
�܂��A���̎���̍\�������|�X�g���ʋ@�\�ƌĂԂ��ƂƂ���B
�@��L�ŏq�ׂ��z���C�g�Z���T4�ƃ^�b�`�Z���T1������̍\���ɐ݂���B�ԊO���Z���T�͑O�ƍ��Ɍv2�A�����g�Z���T�͑O��2�A���E��1���Ōv4�A�{�̂̃^�b�`�Z���T�͑O��2�A����1�Ōv3���g�p����B
�@�d���n�͕W���@�̂��̂����̂܂g�p����B
�S�D�쓮�n
�@�쓮�n���W���@�̂��̂����̂܂g�p����B
MIRS0502�̎��삷��\���̊O�ς������B
���̍\����4�̃p�[�c�ɕ��ނ���A���ꂼ������̂悤�ɌĂԂ��ƂƂ���B
�@ �t���[���㕔
�A �t���[���O��
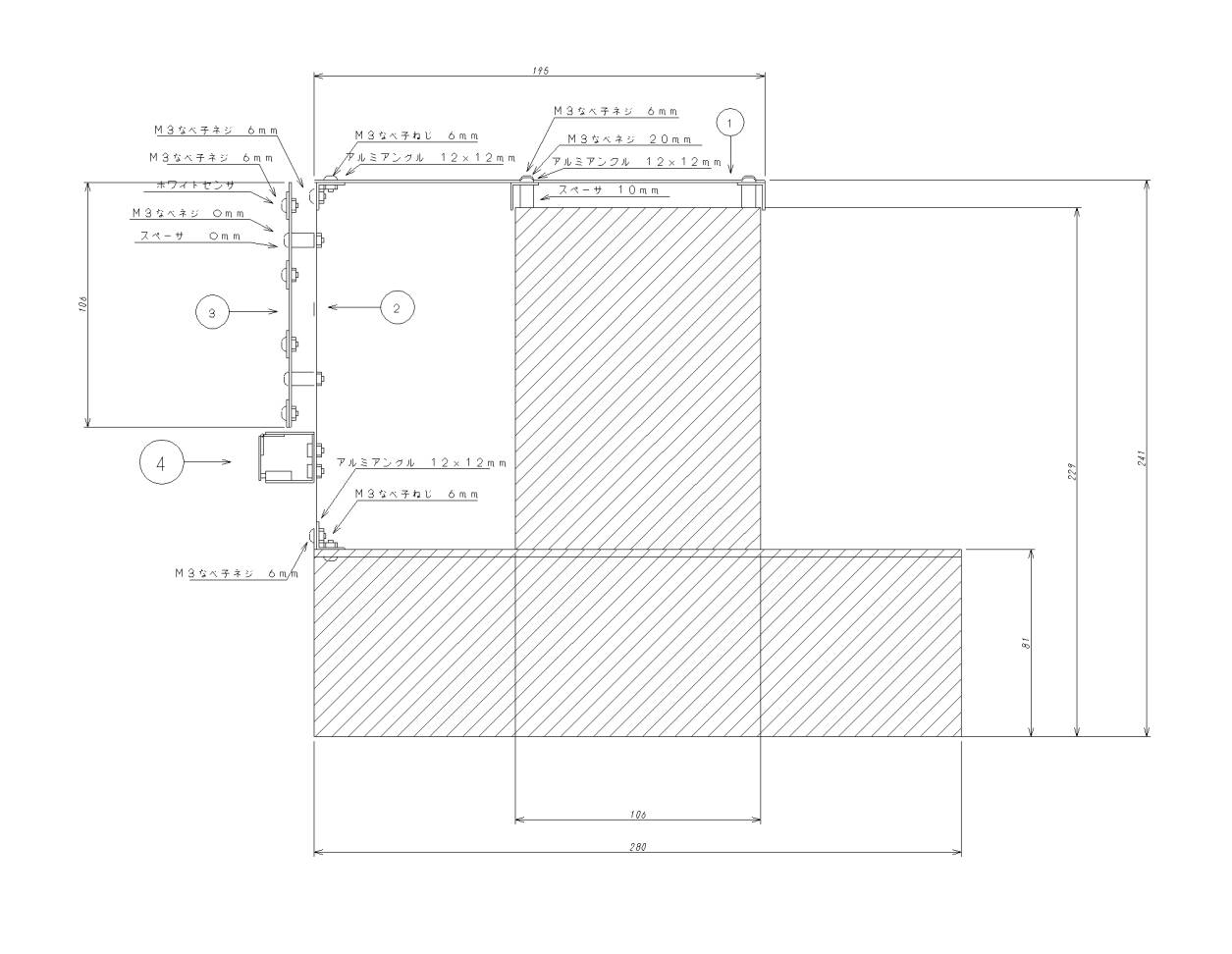
�B �z���C�g�Z���T���t����
�C �^�b�`�Z���T��
��L�ŏq�ׂ�4�̃p�[�c���ƂɁA�\�����镔�i�ƌ����\���c���[�Ŏ����B
�|�X�g���ʋ@�\
|
|�|�@�t���[���㕔
|
|
|
|�|�A���~�i�P�j�@ �~�Q
|
|�|�A���~�A���N���i�P�j�@ �~�Q
|
|�|�A���~�A���N���i�Q�j �~�Q
|
|�|�X�y�[�T�i10mm�j�@ �~�S
|
|�|M3�Ȃ׃l�W�i20mm�j�@ �~�S
|
|�|M3�Ȃ׃l�W�i6mm�j �~�U
|
|�|M3�i�b�g �~�U
|
|�|�A�t���[���O��
|
|
|
|�|�A���~�i�Q�j �~�Q
|
|�|�A���~�A���N���i�R�j �~�Q
|
|�|M3�Ȃ׃l�W(6mm) �~�U
| |�|M3�i�b�g �~�U
|
|�|�B�z���C�g�Z���T���t����
|
|�|�A���~�i�R�j �~�Q
|
|�|�z���C�g�Z���T �~�S
|
|�|M3�Ȃ׃l�W�i10mm�j �~�Q
|
|�|M3�Ȃ׃l�W�i6mm�j �~�S
|
|�|�X�y�[�T�i6mm�j �~�Q
|
|�|M3�i�b�g �~�U
|
|�|�C�^�b�`�Z���T�� |�|
|�|�A���~�i�S�j �~�P
|�|�A�N������ �~�P
|�|�^�b�`�Z���T �~�P
|�|���� �~�P
|�|M3�Ȃ׃l�W�i10mm�j �~�Q
|�|M3�Ȃ׃l�W�i6mm�j �~�S
|�|M3�Ȃ׃l�W�i5mm�j �~�S
|�|M3�i�b�g �~10
�e���i�̐��@�������B
�A���~�i�P�j �F8�~196�~t1
�A���~�i�Q�j �F8�~159�~t1
�A���~�i�R�j �F8�~102�~t1
�A���~�i�S�j �F60�~40�~t1
�A���~�A���N���i�P�j �F12�~12�~216
�A���~�A���N���i�Q�j �F12�~12�~50
�A���~�A���N���i�R�j �F12�~12�~8
�A�N������ �F18�~40
���� �F9�~15
�Ȃ��A�e�A���~�A�A���~�A���N���A�A�N�����͍H�쎺�ɂ�����̂��g�p����B�܂��A�z���C�g�Z���T�A�^�b�`�Z���T�͕W���@�̂��̂����������g�p����B