名称 |
詳細設計書(エレクトロニクス)MIRS0501-ELEC-0001 |
番号 |
|
版 数 |
最終更新日 |
作 成 |
承 認 |
改 訂 記 事 |
|
A01 |
2005.11.1 |
八木・山田 |
伊沢 |
初版 |
|
A02 |
2005.12.22 |
八木・山田 |
伊沢 |
ソフトウェアビジヴィリティ変更 |
目的
本ドキュメントは、MIRS0501エレクトロニクス部の各回路基板の製造仕様書の作成に必要な事項を述べる。
概要
当機のエレクトロニクス部は、主として標準MIRSに倣うかたちになるが、センサの数を、タッチセンサを一つ、赤外線センサを一つ、白線センサを八つに変更する。 また、出力系を一つ増やし、機体が横向きのまま、ポストを獲得するためのアームを動作させるモータの制御部を設計する。
アームの詳細設計を示す
動作概要
モータ駆動制御回路入力と各タッチセンサからの状態によって、モータの駆動、静止と回転方向を制御する。
外装
a. 基板は 小型ユニバーサル基盤:ICB-88(47×72)を用いる。
b. 配置場所のスペースや基板の高さを考慮して、スペーサの長さを3cmとする。この時、基板の下に金属部品(アルミ板、ネジ、ナット等)があるため、それらが基板に触れてショートする可能性があるのでスペーサは長めの物を使用する方が良い。 また、その横にモータ駆動電源の電池ボックスを収めるスペース.を設ける。
c. 基板を取り付けたい位置に、基板の取り付け穴に合わせてφ3の穴をあける。
d. 基板の取り付け位置に基板を取り付ける。
概略ブロック図
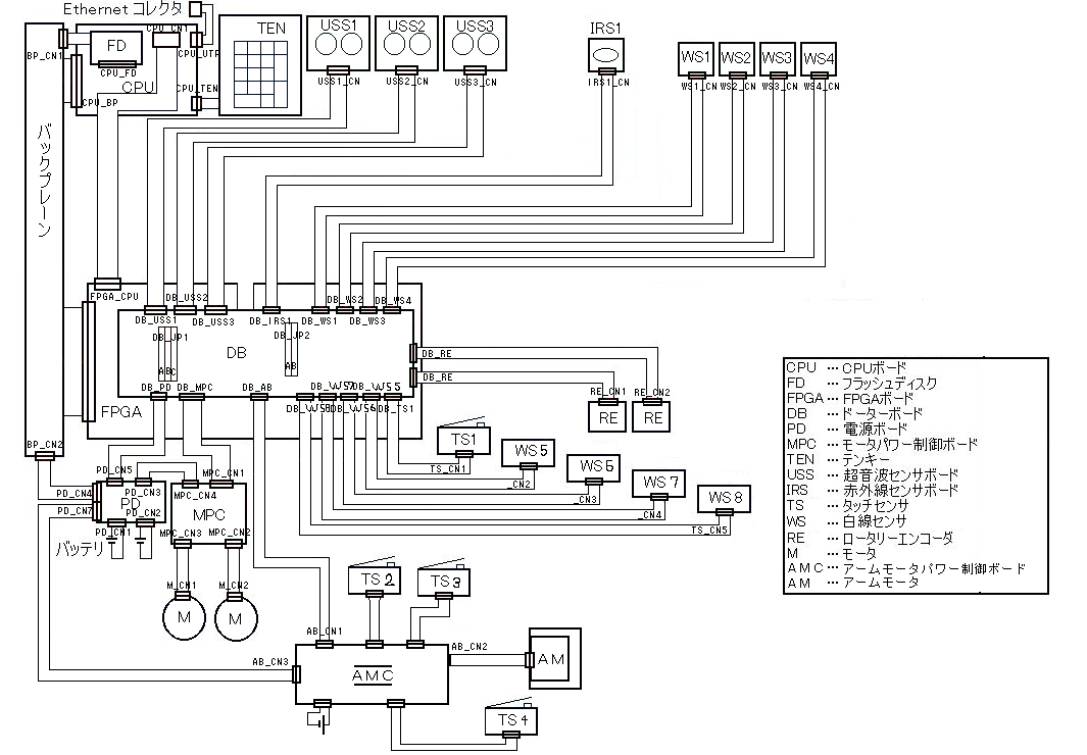
図1.概略ブロック図
図2.FPGA内部回路ブロック図
FPGAからポスト獲得の信号が出力された時、次に挙げるセンサの状態に対応するモータのタイミングチャートを示す
Ts1:
アームがポストに接触した際にLになるタッチセンサ
Ts2:
アームが伸びきった際にLになるタッチセンサ
Ts3:
アームがラックに納まった状態の時にLになるタッチセンサ
(1)アームがポストに接触した場合
(2)アームがポストに接触せずに伸びきった場合
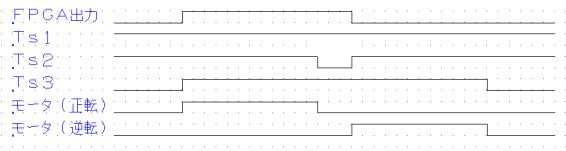
※ 正転がアームを伸ばし、逆転がアームを縮める
ソフトウェアビジヴィリティ
IOポート仕様
|
名称 |
IO port Address[hex] |
R/W |
Port Name |
機能 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
汎用 |
0140 |
R |
GIO |
デジタル入力 1.MP:モータ用電源のON/OFF 2.WLS:白線センサ1-8 3.IRS:赤外線センサ1(赤外線センサの有無のみ。コード判別は0x15Xポー トで設定し読み込む) 4.TS1-5:タッチセンサ1-5
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
AMC
制御信号 |
0160 |
W |
AM_Ctrl |
アームモータを制御する1bit信号
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||