名称 |
システム基本設計書MIRS0501-DSGN-0003b |
番号 |
|
版 数 |
最終更新日 |
作 成 |
承 認 |
改 訂 記 事 |
|
A01 |
2005.9.1 |
伊沢・大村 |
伊沢 |
初版 |
|
B01 |
2005.9.20 |
伊沢・大村・木村・栗田・後藤 |
伊沢 |
第2版 |
Ø
CONTENTS
1.
はじめに
2.
システムの概要
l
システム要求(動作概要)
l
外観
l
ハードウェア
l
ソフトウェア
3.
実現方法
l ハードウェア
l ソフトウェア
1.
はじめに
この仕様書はMIRS0501競技規定に基づきチームMIRS0501の製作する小型自律ロボットの仕様を述べる。
2.
システムの概要
l システム要求
① 1回目の競技において、ポストの位置、番号を正確に確認し、記憶しながらポストを獲得する。
② 2回目の競技において、より早く正確にポストを番号通りに獲得する。
③ MIRS標準機を改良すべき問題点を改良し、より高精度な動作をさせることを目標とする。
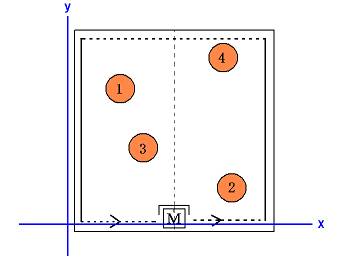
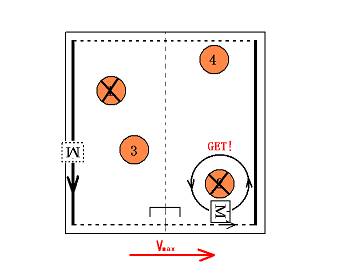
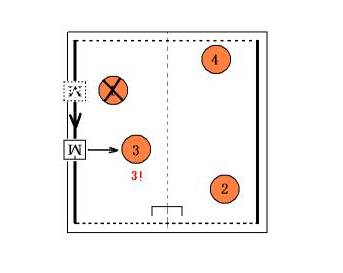
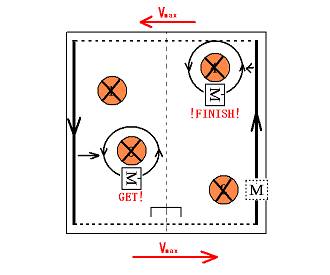
l 動作概要
① 1回目の競技では、競技場外周を走る白線上を走行し、走行中にポストを発見したら番号と位置を記憶させる
② ポストを獲得するときアームを伸ばして獲得する。
③ 2回目の競技では、1回目で得られたポストの番号・位置情報を利用し、1回目よりも早く正確にポストを獲得していく。
④ 白線上を走行するので、白線センサを利用してコースアウトしないように走行する。
⑤ ポストが重なった場合については詳細設計で述べる。
Ⅰ Ⅱ

 Ⅲ Ⅳ
Ⅲ Ⅳ
Ⅴ
l 外観図
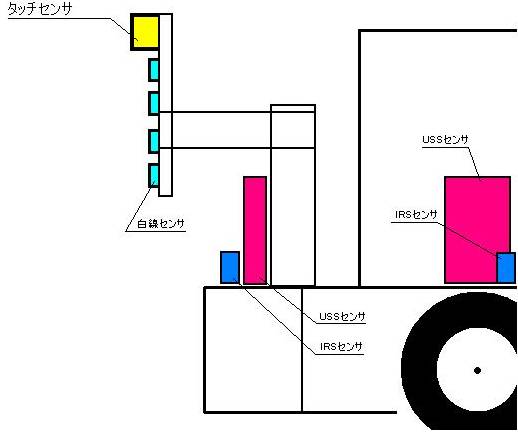
l ハードウェア
基本的にはMIRS0501標準機を元に製作する。変更点は以下の通りである。
① 白線センサ
ポストに設けられた黒色のラインを読み取り、ポスト番号を識別する為4つ使用する。
外周の白線を走行中にコースアウトしない目的で左右に2つずつ計4つ使用する。
② タッチセンサ
ポストに接触したら、ポスト番号認識用白線センサを動作させるために用いる。
ポストを獲得する為のアームの動作に使用する。
③ ポスト獲得用アーム
ポスト獲得時にMIRS本体がポストに接触するのではなく、アームを伸ばして獲得する。詳しくは実現方法参照。
l ソフトウェア
基本的にはMIRS0501標準機を元に製作する。変更点は以下の通りであり、それを実現するためのプログラムを追加していく。
① フィールド外周の白線に沿って走行するようにプログラムを変更する。
② 正方形フィールドの外周のうち、対辺2辺の白線は超音波センサでポストをチェックしつつ進み、残りの2辺の白線では最高速度で通過する。
③ 超音波センサでポストを認識したとき、確実性向上のためもう一度確認する。
④ ポスト番号を調べる方法は、タッチセンサがポストに接触してから白線センサで黒色のラインの本数を0、1で確認する。
⑤ MIRS前方に配置した白線センサで左折動作を行う。詳しくは外観図参照。
⑥ 2回目の競技時には、1回目に記憶したポストの順番に獲得する。
3.
機能・性能
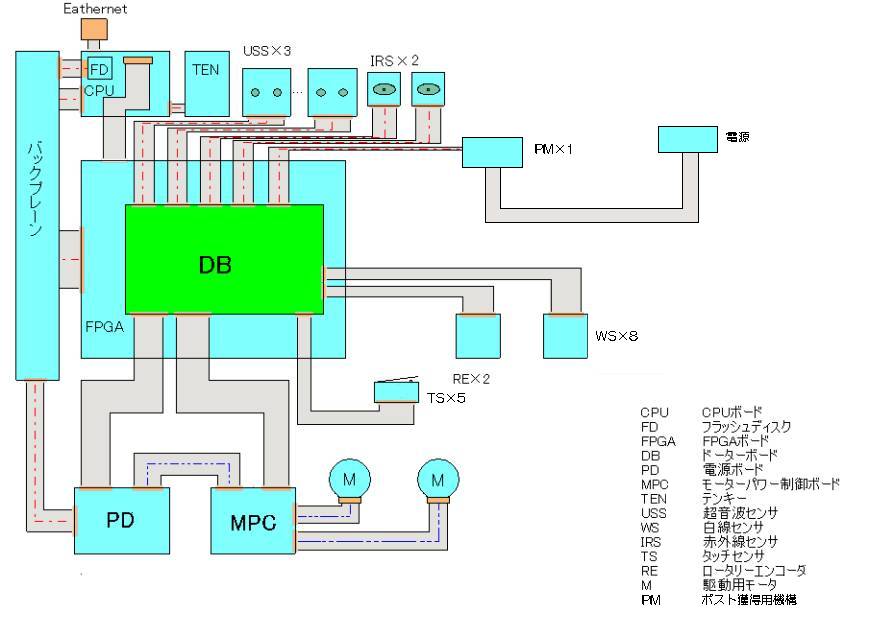
l ハードウェア
① 超音波センサ
ポストとMIRSの間の距離を測定する。フィールド上に点在するポストとMIRS間の距離を測定することを可能とする。
② 赤外線センサ
白線センサでポスト番号を確認した後、赤外線センサがどこから出ているか調べてポストを獲得するのに用いる。
③ タッチセンサ
MIRSがポスト獲得時にポストのスイッチを押したかどうかを確認するために用いる。
④ 白線センサ
競技フィールド外に出るのを防ぐ。また、ポスト番号を確認するために用いる。
l ソフトウェア
使用するデバイスドライバ
① 赤外線センサ
② タッチセンサ
③ 赤外線のコード判別
④ 超音波センサ
⑤ PWM
⑥ ロータリーエンコーダ
⑦ 白線センサ
4.
実現方法
l ハードウェア
① 超音波センサ
標準で搭載されているものを3つ使用する。
② 赤外線センサ
標準で搭載しているものを2つ使用する。
③ タッチセンサ
標準で搭載しているものを3つ使用し、加えてさらに2つ使用する。
内わけはポスト番号を調べる際にポストに接触したか確認する機構に1つ。
アームの先端に1つ。
アームが戻ったかどうか確認するのに1つ。
マシン全部のバンパに2つ。
④ 白線センサ
競技場のラインを調べるためにMIRS下面に4つ搭載し、ポスト番号を認識するためにMIRS前面に4つ搭載する。
MIRS下面に設置する位置は外観図参照。
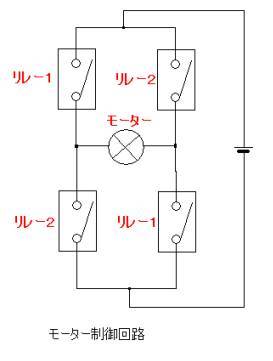
⑤ ポストゲットメカニズムについて
ポストを取得する際、独自の機構を使用する。以下はその概要である。
● 動作
① ポスト取得時、ドーターボードからリレー1に信号を送る。
② モーターが正転して、ラックが伸びる。(ポスト取得)
③ 停止用タッチセンサ1が押され、ドーターボードに信号が送られる。
④ ドーターボードからリレー1への信号の送信を停止する。
⑤ モーターが停止する。
⑥ 一定時間後、ドーターボードからリレー2へ信号を送信する。
⑦ モーターが逆転し、オブジェクトが収納される。
⑧ 停止用タッチセンサ2が押され、ドーターボードに信号が送られる。
⑨ ドーターボードからリレー2への信号の送信を停止する。
⑩ モーターが停止する。
※タッチセンサ1と2は外観図参照