名称 |
システム提案書 |
番号 |
MIRS-DSGN-0001 |
|
版 数 |
作成日 |
作 成 |
承 認 |
改 訂 記 事 |
|
A01 |
2005.7.19 |
栗田・後藤 |
伊沢 |
初版 |
|
|
|
|
|
|
|
|
|
|
|
|
1. 目的
本文書はMIRS0501の行動計画案についてまとめたものである。
これに基づき開発を進めることを目的とする。
2. システムの特徴
ハードウェア
ハードウェアについては、標準のものに加え、ポストに付けられた黒い色のラインを読み取る為の白線センサを搭載する。
動作の特徴
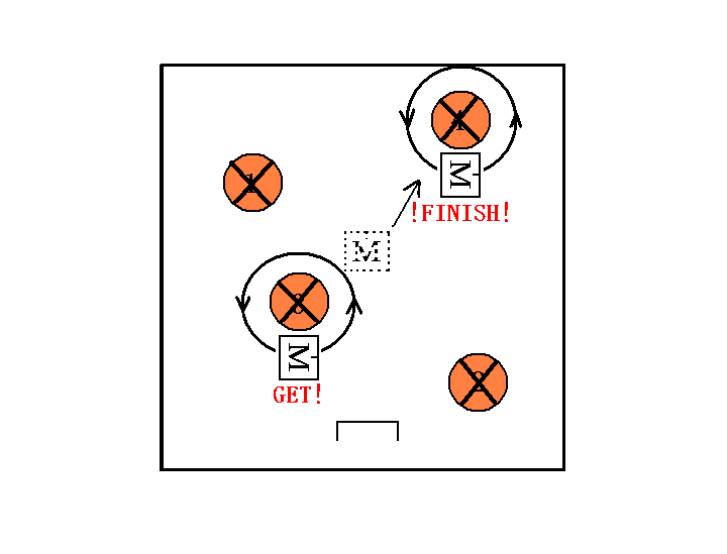
○一回目は、競技場中央を基準としてポストを確認し、ポスト番号の順にポストを獲得していく。この際、ポストの番号・位置を記憶する。
○二回目は、一回目で得られたポストの番号・位置情報を利用し、一回目よりも早く正確にポストを獲得していく。
○ポストの確認動作(獲得動作)ごとに、中心に戻り補正を行う。
3. ハードの基本構成
使用するセンサ
・ タッチセンサ×3
ポストの周回動作中などのポストへの誤接触を検出する。
・ 赤外線センサ×2
ポスト番号の獲得、スイッチ位置の判定を行うの為に左側の赤外線センサ、スイッチを押す動作後、赤外線が出ているかどうかの確認を前方の赤外線センサで行う。
・ 超音波センサ×3
ポストの有無を検出する。
2つの超音波センサの値を利用し、周回動作前に機体とポストを垂直に調節する。
・ 白線センサ×2
競技場の四隅の白線を検出し、機体が競技場から出る事を防ぐ。
・ 白線センサ×4
ポストに付けられた黒い色のラインを読み取り、ポスト番号を認識する。
電子コンパス
補正を行う際に正しい向きを向いているか確認するために用いる。
構成図
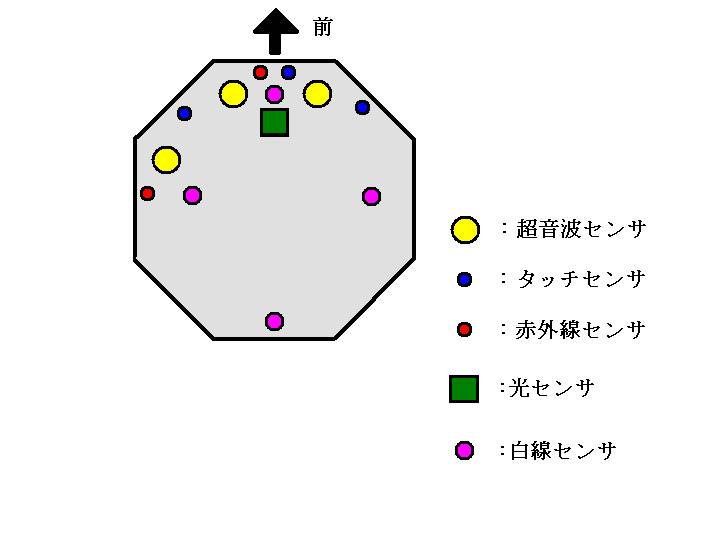
側面図
4. 動作概要
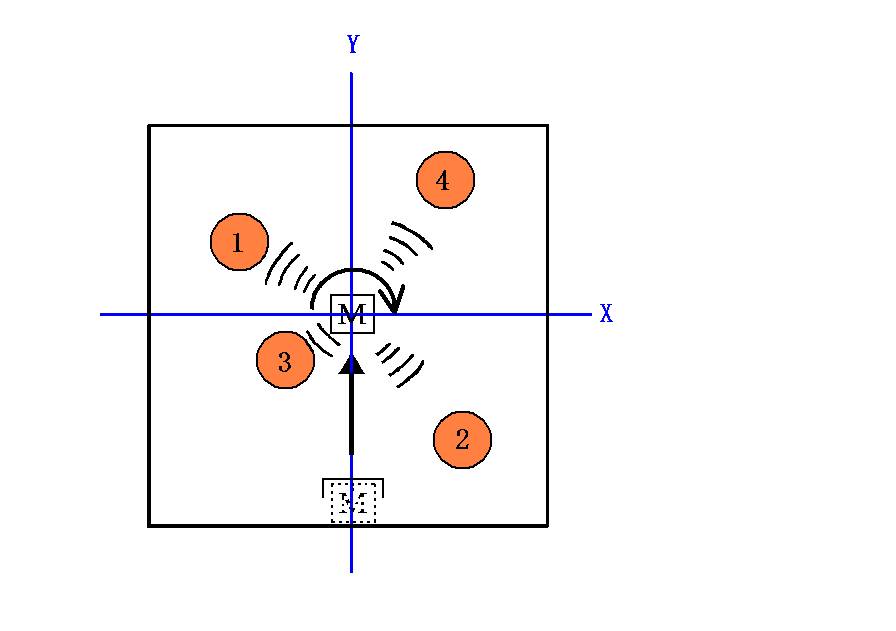
一回目の競技
1. はじめに競技場中央に移動し停止する。この際、前方にポストが在る可能性もあるので、超音波を前方出してポストの有無を確認する。進行方向にポストがあった場合は回避する。中央付近にあった場合は、超音波でそのポストを認識できる位置で停止する。
停止した位置で時計回りし超音波センサでポストの位置を検出する。この際、確認できない位置にあるポストはあとで確認する。
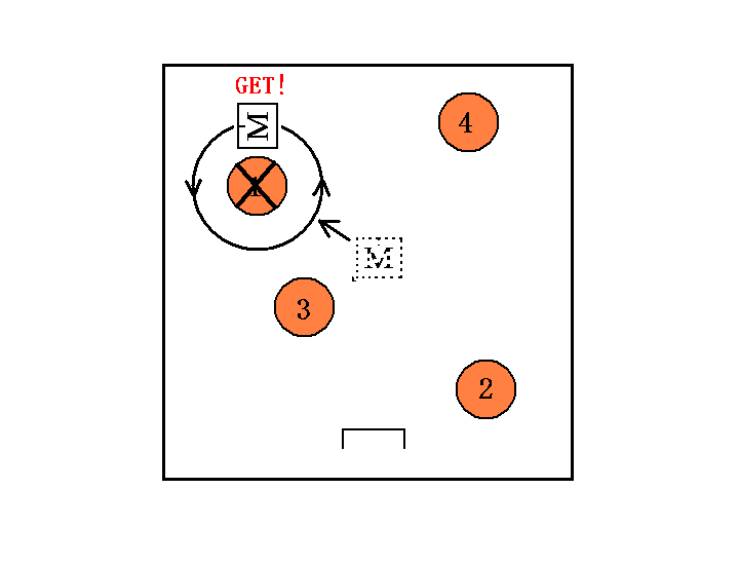
2. 中央から2番目近いポストに向かいポストに付けられた黒色のラインの本数でポスト番号を確認し、記憶する。ポスト番号が1番であればポストを獲得し、それ以外であれば中央に戻り、超音波によって検出したポストの位置関係から中央の位置を割り出し補正する。再び時計回りに回転しポストの位置を確認する。また、1.でポストが全て確認できていない場合はポストの周回動作で180度回転したらポストと反対側にポストがないか超音波で確認する。ここで確認できない場合は元に戻る。確認した場合このポストの確認に向かう。
また、ここでポスト番号が1以外だった場合、その番号を記憶しておくが、この後の動作でその数より少ないポスト番号が全て獲得された場合、中央に戻っ
たときに中央からのポストの距離に関係なく、そのポスト獲得に向かう。
3. 次は1番近いポストを確認しに向かう。以降中央からの距離が3,4,5番目のポストに確認に向かう。
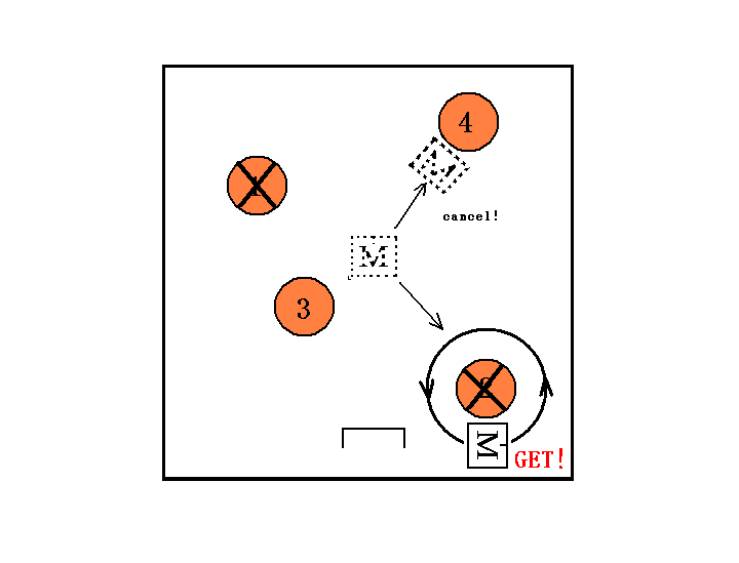
4. 3.を繰り返し全てのポストを獲得する。
二回目の競技
1. 一回目の中心位置と同じ位置に移動し停止する。一回目の競技で記憶した情報を利用し、ポスト番号1のポストへ向かい周回動作をし、獲得する。そして競技場中央に戻り、超音波によって検出したポストの位置関係から中央の位置を割り出し、ポスト番号2のポスト獲得へ向かう。
2. これを繰り返し全てのポストを順番通り獲得する。
5. 関連ドキュメント
MIRS標準機システム提案書
MIRS0501技術調査書