目的
本文章はMIRSの回避動作について示したものである。必要性
MIRSにおいて、回避動作が考えられる状況は次の3つである。1. 白線センサが感知したとき
2. スタート時、最大数確認できないとき
3. ポスト間を移動するとき
対策
それぞれの場合についての回避動作について説明する- 白線センサが感知したとき
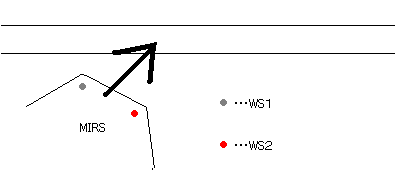
図1の場合
ws1 or ws2がon
↓
ある程度後退
↓
90°回転(ws1のとき右回転、ws2のとき左回転)
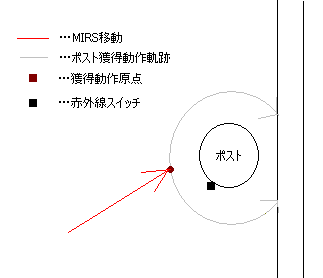
図2の場合 ポスト周回を始める座標を光学式マウスにより記憶する(この点を以降、始点とする)
↓
プログラム通りにポストの周りを回転する(このときポスト獲得動作は時計回りを正転とする)
↓
白線センサ“感知”(ws3 or ws4)
↓
後退して始点まで移動
↓
180°回転する
↓
赤外線センサ、超音波センサを左右切り替えて逆回りをする
↓
ポストの番号を確認し、必要ならポストを獲得する
↓
白線感知
↓
始点に戻り、通常のルートで移動する
- スタート時、最大数確認できないとき
プログラム通り、前進する
↓
ポスト探索モード(ポストは4つとする)
(1)返り値4つの場合
↓
この点を原点としプログラム通りにポストを獲得していく
(2)返り値3つの場合
↓
この点から前後左右にある程度動く
↓
ポスト探索モード
↓
上記の移動を3回ほど繰り返す
- 4つ確認できたら、その点を原点とする
- 4つ確認できない場合、ポスト迂回時にポストの裏にポストがないか確認する。
尚、このとき光学式マウスで裏の座標を覚えられたら覚えさせる
- ポスト間を移動するとき
ポスト間を移動するときポストがある程度近づいたら回避行動をとる
近づいたかどうかは超音波センサーを用いる(規定値以下になったら近づいたということとなる)
USS1が規定値以下になる → 右に回避
USS2が規定値以下になる → 左に回避
- 4つ確認できたら、その点を原点とする
関連文章
特になし