MIRS0403 ステッピングモータ技術調査報告書 |
|
番号
|
MIRS0403-TEST-0003 |
|
版数 |
最終更新日 |
作成 |
承認 |
改定記事 |
|
A01 |
2004.7.21 |
佐藤基 |
佐藤基 |
初版 |
|
A02 |
2004.7.22 |
上園隆文 |
上園隆文 |
ドキュメント番号の変更 |
ステッピングモータとは
ステッピングモータは、パルス発振器に同期して回転する同期モータです。
回転速度は、パルスの周波数によって制御します。
モータは1パルスあたりの回転角度(ステップ角)が決まっていますので、たとえば、ステップ角1.8のモータを360°回転させようとすると、360/1.8=200パルス必要になります。
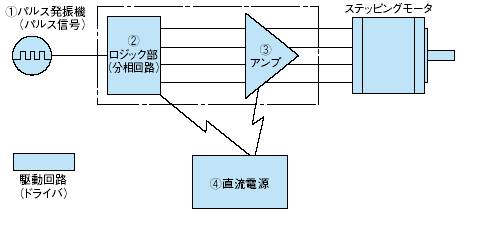
ステッピングモータの使い方
ステッピングモータはインダクションモータやDCモータとは異なり、モータにただ単に電源を接続するだけでは回転しません。モータを駆動する場合、回転速度や回転角度を決めるパルス発信機、巻線を流す電流を順次切り替える駆動回路(ドライバ)、回路およびモータを駆動させる直流電源が必要になります。
ステッピングモータの種類
ステッピングモータには2相、3相などの種類がある。
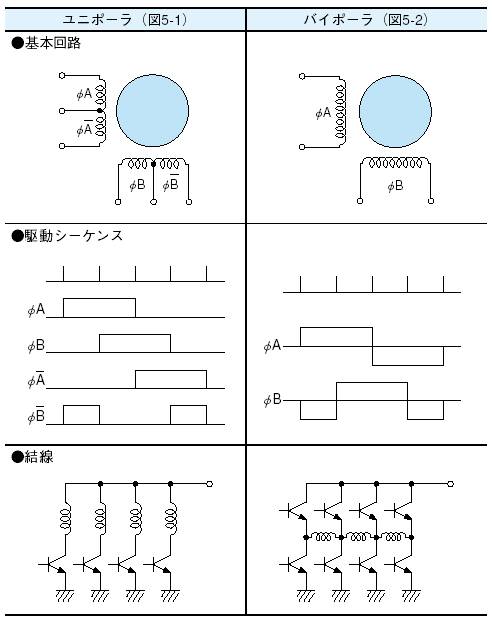
2相モータには、ユニポーラ駆動とバイポーラ駆動がある。
[ユニポーラ駆動]
ユニポーラ駆動とは、ひとつの巻線に対し常に一定方向に電流を流す方式でセンタタップを設けた結線のステッピングモータに適合します。図に示すように駆動回路はシンプルになりますが、その分巻線の利用効率が悪く(バイポーラ駆動に対して1/2)、低速回転時の出力トルクが低くなります。
[バイポーラ駆動]
バイポーラ駆動とは、ひとつの巻線に対し双方向に電流を流す方式で結線のステッピングモータに適合します。ユニポーラ駆動とは逆に駆動回路は複雑になりますが、巻線の利用効率がよく、低速回転時の出力トルクは高くなります。
ステッピングモータを使うことの利点
パルスの分だけ回転するのでロータリーエンコーダをつける必要がない。
誤差が少ないので正確に位置を決められる。
参考:http://www.japanservo.jp/digital7/general/pdf/C_technique.pdf