| 沼津高専 電子制御工学科 | ||||||
|
||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2004.6.22 | 許鼎昌・齋藤裕樹 | 前田佳祐 | 初版 | ||
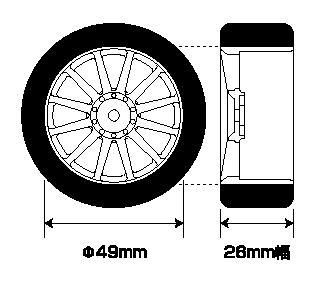
・標準のタイヤ
品番 ST-L26SH サイズ 26mm幅 コンパウンド(材質) Lラバー(スポンジ系) グリップに優れリアタイアに適します。 スーパーハード 硬度(目安) 約48度
・タイヤは軽く
MIRSなどのようにすばやい前進、後進、左右方向転換をするマシンでは回転運動の慣性モーメントが出来るだけ小さい方が有利です。これは軽いタイヤは動きやすく、停止させやすいことから分かる。また慣性モーメントの性質から分かることだが、同じ重さのタイヤでも車軸の中心部を軽くするよりも周辺の接地面(トレッド)部分を軽くした方が有利である。またタイヤの直径を小さくするとスピードは下がるけど、トルク(回転力)はあがる。
タイヤの重さは15倍
マシン本体(車体やシャーシ)の重量に対して、タイヤや車軸などのシャーシの下にぶら下がり、動く部分の重さを「バネ下質量」という。自動車工学ではタイヤが回転している状態での「バネ下質量」は慣性モーメントの作用を考慮すると本体の重さの10倍から15倍の重さにを相当することが証明されている。
要するにタイヤ・ホイールを1kg軽くすれば、4本で4kgの15倍で60kgの軽量化に相当する。背負いかばんの重さはあまり影響ないけど、足に履くものを鉄下駄からスニーカーに変えると大きな違いが出てくる。これと同じである。
タイヤによる誤差
一番誤差のもとになるところは車輪と地面の接点です。主だった誤差は2点あります。一つは車輪直径の誤差で、車輪の材質によってはつぶれたりして半径が変わります。状況によってはこの誤差が響くことがありますが、かといってあまり固いものをつかうと地面との接触が保持できなくなったり跳ねたりすることになるため、大体の場合は固めのゴムなどを使います。もちろん摩擦も重要です。
もう一点は車輪の間隔です。これが狂うと旋回したときに誤差が出ます。車輪を設計するときに、接触面積の大きな車輪にした場合(幅広のタイヤなど)は、計算に影響する接触点が走行中に状況によって移動します。精度を上げるにはあらかじめ細身の車輪(というよりタイヤ部分)にして、横方向の接触点を限定する必要があります。
タイヤの断面は四角か丸か
ロボットのタイヤに限らず、タイヤの接地面をトレッドという。進行方向に対してタイヤの断面が幅広で四角(□)のものをスクエアショルダー、半円(∪)のものをラウンドショルダーという。先に述べたレーシングカーなどの幅広タイヤのトレッドはスクエアショルダーで地面とタイヤの設置面積が大きく強い摩擦が期待できますが転がり抵抗が大きい分パワーもタイヤに食われる。
なのでシンプルで小回りを必要とするロボットであれば、ラウンドショルダーのタイヤが有利です。さらにリング上の差や溝、轍(わだち)を乗り越えるためにはラウンド形状が必要である。
スクエアショルダーとラウンドショルダーの比較
スクエアショルダー
接地面が広い。平滑な路面と高精度名車軸、タイヤの加工が必要
ロボット同士の衝突、起伏のある競技リングなどの外乱要素が大きなロボコンでは、スクエアショルダーのタイヤトレッドの接触面積の変動がロボットの動きを大きく左右してしまう。
傾くと設置面積が激減し、操縦性が大きく変化してしまう。
衝突、転回、起伏のある路面が不得意であり、ロボット用タイヤに不向きである。
ラウンドショルダー断面
接地面が小さく転がり抵抗が小さい。多少、車軸やタイヤの精度が低くても実用になる。
小回りが利き、運動性能に優れる。
車体が傾いても、操縦性の変化は少ない。
段差や轍を乗り越えやすい。
トルクと摩擦
タイヤで発生させていい駆動力は摩擦力に制限されます。摩擦力以上の力を出そうとすると、車輪がスリップしてしまいます。例えば摩擦係数を0.1と見積もった場合、自重×0.1が上限になります。これを車輪半径で割ったものがトルクになります。これ以上は使えない出力になってしまうため、ロボットとしての機動性を考えた場合はその分を速度に割り当てた方がいいでしょう(出力(動力)=速度×トルク)。
潤滑スプレーで摩擦を減らす
回転が早く、狭い隙間には潤滑スプレー、回転が遅い部分やキャスターなどのベアリングにはグリーススプレーを吹きかける。