MIRSがより正確な動きをするために必要な駆動系と超音波センサの精度を確認し、改めて正確さを向上させる方法を調べる。
3. 超音波センサの精度
担当者:斎藤、曽根、野村今回もう一度超音波センサが正確に動作しているか調べたところ、今使っているセンサに関してはかなり正確な値が得られた。 ただ、感知する幅が広すぎて時々関係ないものまで感知してしまうことがあり、そうなってしまうと正しく動かなくなってしまう場合がある。
改善策
白い紙をセンサの下側だけでなく、全体を覆うことにして直線上のもの以外感知しないようにすべきである。
4. 駆動系の精度
担当者:日向、前田、渡邉駆動系の調査をした。 動作報告書作成時に使用した、ロータリーエンコーダのシステムチェックを行い、入力した距離と実際に走る距離の誤差を計算した。 このときのチェックは、入力した距離を入力した時間で動くというものを使用した。 時間はすべて一秒で、距離を10cm、20cm、30cmと変えて測定したところ、ランダムに1.5cm〜4cm近くの誤差が検出された。 しかし、動きは左右へ曲がることなくしっかりとまっすぐ進んだ。
改善策
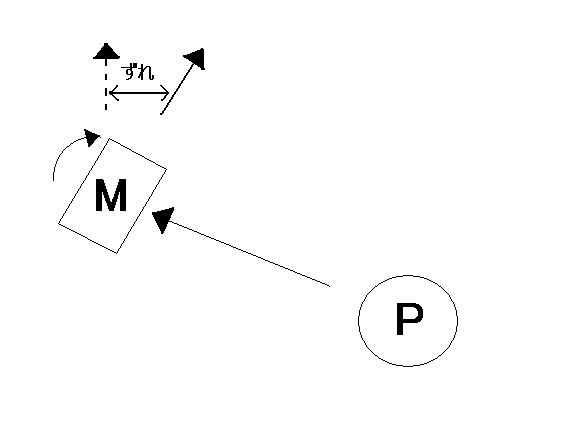
ロータリーエンコーダと光学式ロータリーエンコーダの調査より、光学式ロータリーエンコーダが使用可能なら使用し正確性を向上させる。 また、動きに左右へのずれはないため超音波センサをうまく使いながら、この誤差をできるだけ小さくする。
5. センサに関する追加技術調査
白線センサ実際の動作では、競技場端でMIRSを白線に対して垂直に補正する必要がある。 そのため、白線センサがどの程度白線に重なれば反応するのかを調査した。 手動でMIRSを動かし白線センサの反応を確認したところ、白線と少し重なっただけで反応した。 しかし、実際は反応してから停止するまでに若干時間がかかる可能性があるので、 プログラムを作る際にはその誤差を修正できるようにする。超音波センサ
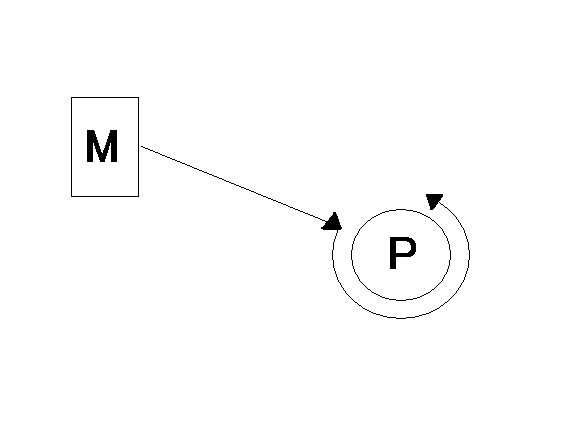
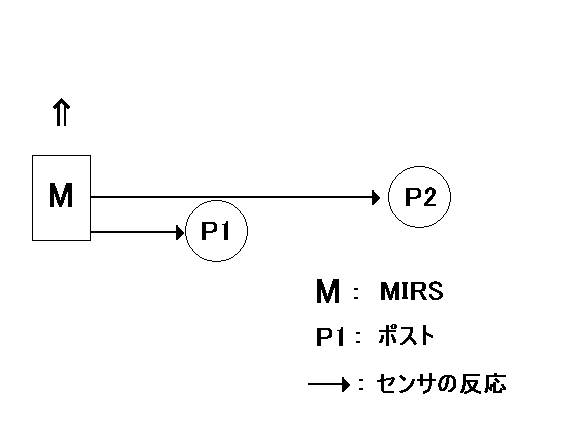
超音波センサでポストがMIRSの真横にあると判断したとき、 あまりずれているとMIRSは目的とする動作を行うことができない。左右にひとつずつ超音波センサがついている現在の状態で、どの程度正確に判断できるかを調査した。 手動での調査を行った結果、誤差は1cm以内だったので、 とりあえずは、かなりゆっくりな動作であれば可能、と判断した。 また、ポストが少し重なっていた場合、'ポストが2つある'と認識するためには 2つのポストがどの位ずれていれば良いのかを調査した。 調査の中で、最初の段階では、左右40°程度ずれていても反応してしまった。 そこで、超音波センサに大きめの紙を巻いてみたところ、10°〜15°程度までは減少させることができた。 この位なら、よほど重なっていない限りはポストが2つあっても認識できると思われる。 問題は完全に重なっている場合と、回避行動についてだが、それは後々考えていきたい。