2.概要
3.動作モード
4.モードの区分
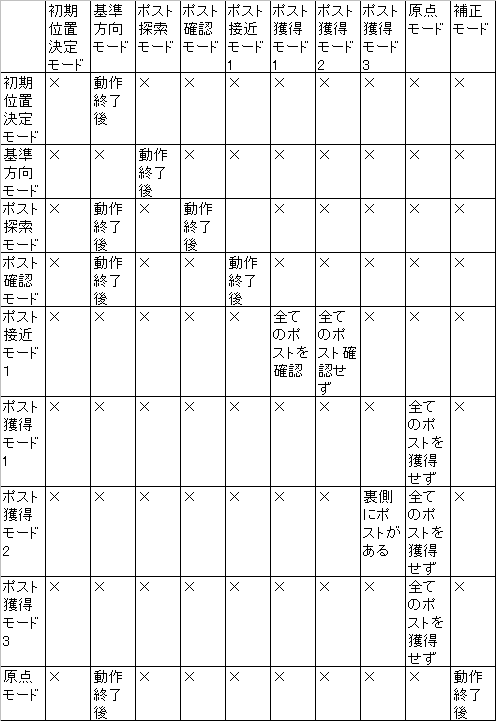
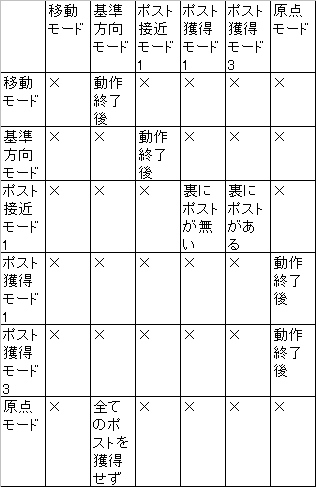
5.モード遷移
6.モード詳細
- 1.モード
- 初期位置決定モード
- 移動モード
- 基準方向モード
- ポスト探索モード
- ポスト確認モード
- データ保存モード
- データ読み取りモード
- ポスト接近モード1
- ポスト獲得モード1
- ポスト獲得モード2
- ポスト獲得モード3
- 原点モード
- 消去モード
-
a.初期化モジュール
b.電子コンパスモジュール
c.いい位置取りモジュール
d.標準モジュール
e.デバイスドライバ
1.はじめに
- 本ドキュメントは、MIRS0401
基本設計書に規定されたシステムの動作規定、状態遷移を実現する各タスクの開発(コーディング、試験等)に必要な事項を述べる。
- MIRS0401 ソフトウェアは、RT-Linux上で動作するプログラム群で構成される。プログラムはC言語でかかれ、Linux の標準の API
とともに、行動モードに対応したプログラム、一つの機能を複数のプログラム群で提供する機能モジュール、および、RTタスク、ドライバと、補助関数と独自に定義したヘッダファイルから構成される。
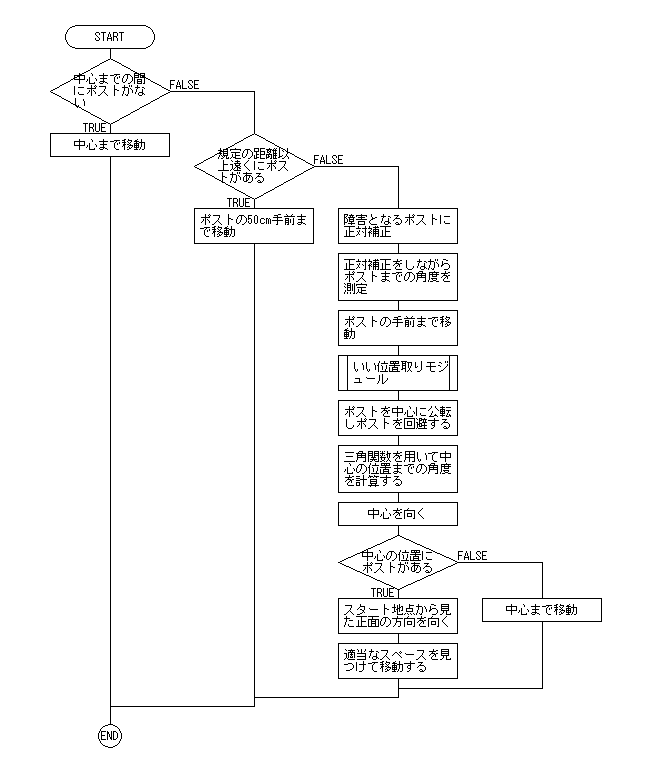
- 初期位置決定モード default1
ポスト探索をするまでの初期位置を決定するモード。ポストが競技場中央までの道のりにあった場合は回避して、中央付近にポストがあった場合はポスト探索モードに支障が出ないような位置を探し、決定した初期位置まで移動するモード。
- 移動モード default2
一回目の初期位置決定モードで保存したデータをもとに、一回目の初期位置まで移動するモード。
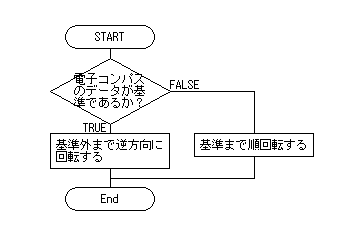
- 基準方向モード s_direction
電子コンパスを使って、あらかじめ決められた方向を向くモード。
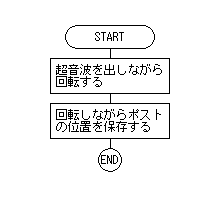
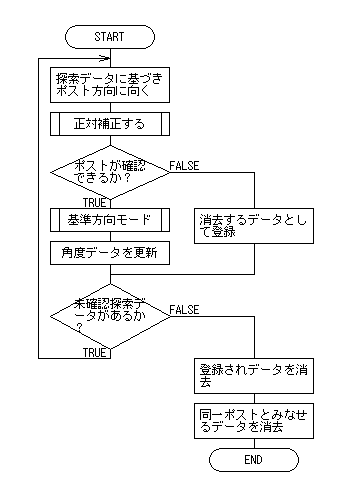
- ポスト探索モード post_search
一回転しながら超音波を使ってポストの位置を確認する。
- ポスト確認モード post_check
ポスト探査モードで見つけたポストが本当にあるか確認するモード。
- データ保存モード data_w
1回目の競技で保存した構造体データを2回目の為にdatファイルとして保存するモード。
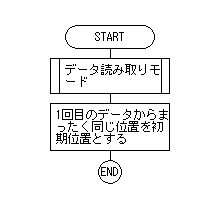
- データ読み取りモード dara_r
data_wで保存したdatファイルを読み取り、そのデータを構造体に格納するモード。
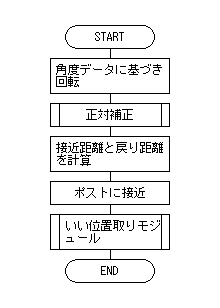
- ポスト接近モード1 approach1
見つけた順にポストの方向を向き、発見したポストまで超音波を出して正対する。ポストから適度に離れた位置まで近づいたら、いい位置取りモジュールを使って、ポスト獲得モードに備えるモード。
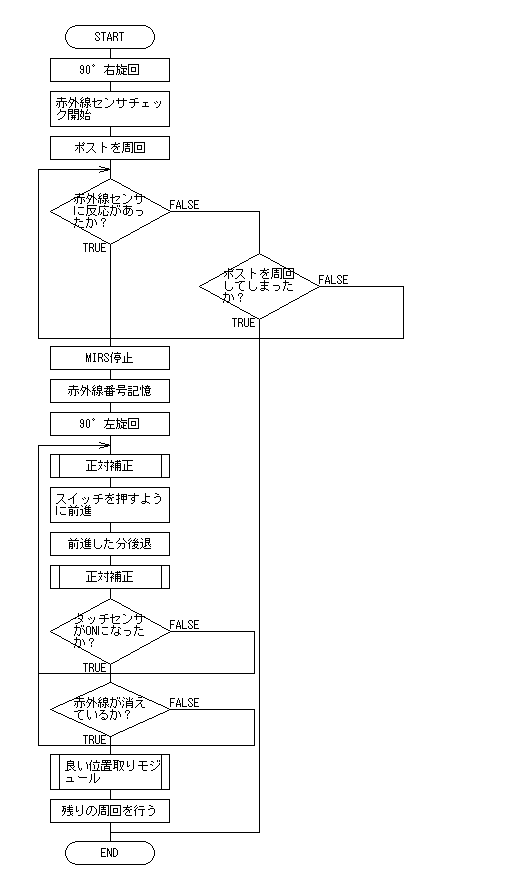
- ポスト獲得モード1 get1
ポスト確認モードで、全ポスト数を確認できた(全ポストを確認できなかったが、ポストの裏に隠れていたものを発見し、獲得した後も含む)場合に行うモードで、時計回りに回転しポストを周回しながら赤外線を確認してコードを保存し、ポストの獲得を行う。
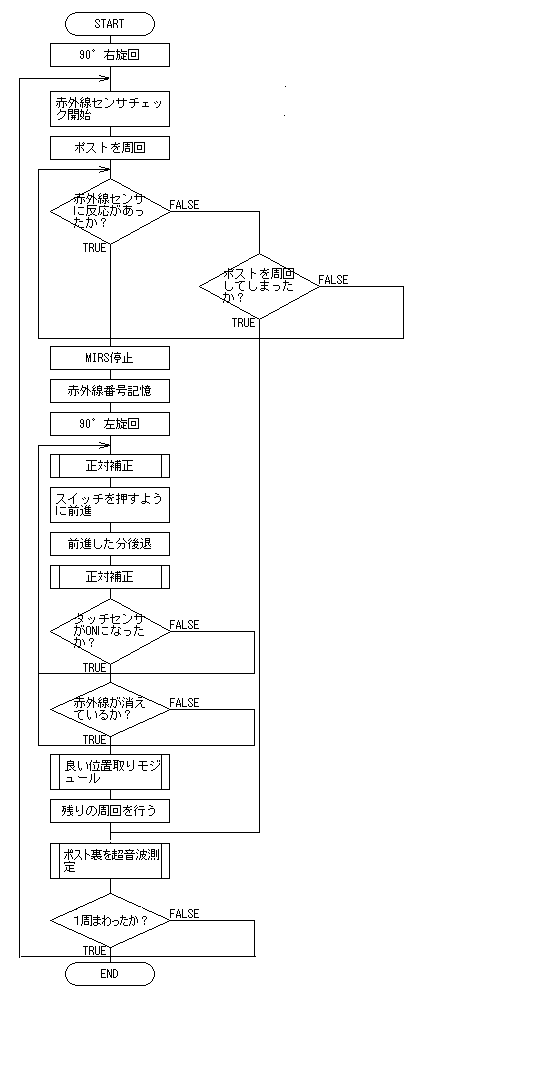
- ポスト獲得モード2 get2
ポスト確認モードで、全ポストを確認できなかったときに行うモードで、赤外線を確認しながらポストの周囲を180°回転してから停止して、裏にポストが隠れていないか確認する。裏にポストがあることを確認した場合は、手前のポストを獲得した後に裏のポストの獲得に行く。
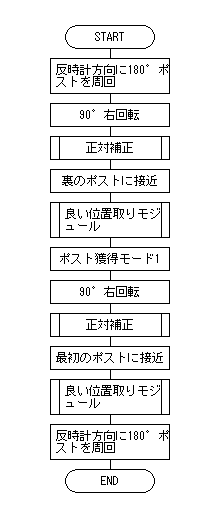
- ポスト獲得モード3 get3
ポスト獲得モード2で、裏にポストが隠れていることが確認できた場合にその裏のポストを獲得するためのモードで、手前のポストにそって、裏のポストの獲得をしてポストに沿って元の位置に戻る。ここでもポストのコードを保存する。
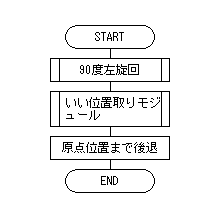
- 原点モード move_center
ポスト獲得モード後に、初期位置(基準位置)に戻るための動作。
- 消去モード delete
赤外線コードが取得できなかったデータを消去し、赤外線コードが取得できたデータを2回目用に並び替え構造体に保存するモード。
- 試技一回目で使用するモード
- 初期位置決定モード default
- 基準方向モード s_direction
- ポスト探索モード post_search
- ポスト確認モード post_check
- データ保存モード data_w
- ポスト接近モード1 approach1
- ポスト獲得モード1 get1
- ポスト獲得モード2 get2
- ポスト獲得モード3 get3
- 原点モード move_center
- 消去モード delete
- 試技二回目で使用するモード
- データ読み取りモード deta_r
- 移動モード default2
- 基準方向モード s_direction
- ポスト接近モード1 approach1
- ポスト獲得モード1 get1
- ポスト獲得モード3 get3
- 原点モード move_center
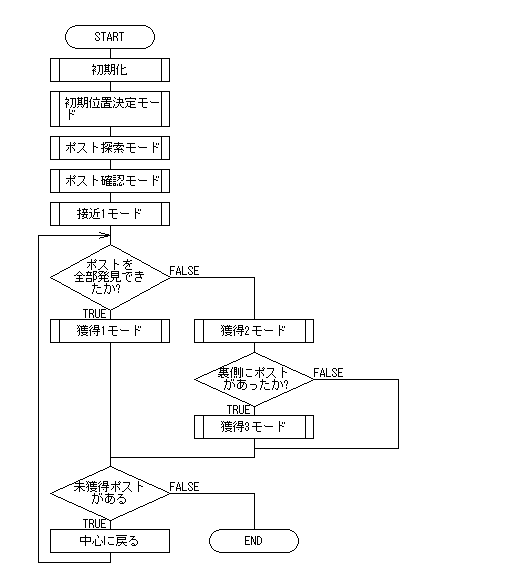
- 試技一回目 main1
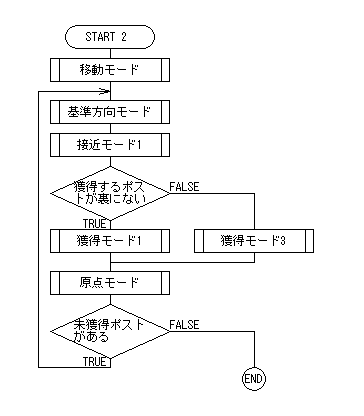
- 試技二回目 main2
- 機能
- 関数名
- IOアドレス IRQ
- 電子コンパスデバイスドライバ
- 電子コンパスの方角データを取得する。(3bit)
- e_compus_dd
- 0140 *1
- LCDデバイスドライバ
- LCDに文字列を表示する。
- lcd_dd
- 0100 / 0102
- TSデバイスドライバ
- 基本機能は標準機のものと同じくする入出力ポートbitを0〜3を0のみに変更する。
- ts_dd
- 0140 *1
*1 標準機ではアドレス0140番の0〜3bitを使用していたが、MIRS0401では電子コンパスにアドレス0140番の1〜3番を割り当てる。タッチセンサは3つの前面タッチセンサを同じものとして、アドレス0140番の0bit目を使うことにする。
これ以外の「白線センサデバイスドライバ」「赤外線センサデバイスドライバ」
「赤外線コード判別デバイスドライバ」「超音波デバイスドライバ」
「PWMデバイスドライバ」「ロータリーエンコーダデバイスドライバ」は標準機のものを使用する。
5.モード遷移
- (1)機能モード
モード名 |
main1 |
構成要素 |
正対補正 |
関数名 |
default1() |
フローチャート
モード名 |
main2 |
構成要素 |
正対補正 |
関数名 |
default1() |
フローチャート
モード名 |
初期位置決定モード |
構成要素 |
正対補正 |
関数名 |
default1() |
フローチャート
モード名 |
移動モード |
構成要素 |
正対補正 |
関数名 |
default2() |
フローチャート
モード名 |
基準方向モード |
構成要素 |
RTタスク起動 |
関数名 |
s_direction() |
フローチャート
モード名 |
ポスト探索モード |
構成要素 |
超音波距離測定 |
関数名 |
post_search() |
フローチャート
モード名 |
ポスト確認モード |
構成要素 |
超音波距離測定 |
関数名 |
post_check() |
フローチャート
モード名 |
データ保存モード |
構成要素 |
なし |
関数名 |
data_w() |
フローチャート
モード名 |
データ読み取りモード |
構成要素 |
なし |
関数名 |
data_r() |
フローチャート
モード名 |
ポスト接近モード1 |
構成要素 |
正対補正 |
関数名 |
approach1() |
フローチャート
モード名 |
ポスト獲得モード1 |
構成要素 |
正対補正 |
関数名 |
get1() |
フローチャート
モード名 |
ポスト獲得モード2 |
構成要素 |
正対補正 |
関数名 |
get2() |
フローチャート
モード名 |
ポスト獲得モード3 |
構成要素 |
正対補正 |
関数名 |
get3() |
フローチャート
モード名 |
原点モード |
構成要素 |
RTタスク起動 |
関数名 |
move_center() |
フローチャート
モード名 |
消去モード |
構成要素 |
なし |
関数名 |
delete() |
フローチャート
- (2)機能モジュール
- a.
|
モジュール名 |
初期化モジュール |
|
構成要素 |
TSデバイスドライバ、白線センサデバイスドライバ、赤外線センサデバイスドライバ、赤外線判別デバイスドライバ、超音波センサデバイスドライバ |
|
機能 |
FIFOの初期化、スレッド生成を行なう。生成するスレッドはMIRS標準機と異なり、 |
|
関数名 |
initialize(void) |
- b.
|
モジュール名 |
電子コンパスモジュール |
|
構成要素 |
電子コンパスドライバ |
|
機能 |
電子コンパスのデータが基準方向と一致した場合に戻り値1を返す。 |
|
関数名 |
e_compus (int direction) |
c.
|
モジュール名 |
いい位置取りモジュール |
|
構成要素 |
RTタスク起動 |
|
機能 |
正面にあるポストに正対し、ポスト周回動作を行うのに最も適した状態にMIRSを動かす。 |
|
関数名 |
circle_position (void) |
d.
|
その他に使うモジュールはMIRS標準機のものをそのまま使うので標準機のページを参照のこと |
|
関数名 |
|
行動制御系モジュール void encoder_data3(float *l_angle. float *r_angle, int *br) (タイヤ回転角合計獲得) void pwm_both_data(int l_duty, int r_duty) (P制御duty) void pwm_straight(int l_distance, int r_distance) (P制御直進) void pwm_rotate(int angle) (P制御自転) void pwm_lqr_straight(int distance, int time) (LQR制御前進) void pwm_lqr_rotate(int angle, int time) (LQR制御自転) void pwm_lqr_circle(int radius, int angle, int time) (LQR制御公転) int lqr_straight(int distance, int time) int lqr_rotate(int angle, int itme) int lqr_circle(int radius, int angle, int time) スレッド系モジュール void *irs_ts_ws(void *t) (赤外線、タッチ、白線) void *encoder(void *t) (ロータリーエンコーダ) void *uss_read(void *t) (超音波) |
e.デバイスドライバ
- デバイスドライバ名
※以下を上記の書式で記載する。