| 沼津高専
電子制御工学科 |
MIRS0203技術調査
赤外線センサ |
| MIRS0203-TECH-0002 | |
| 改訂記録 |
| 版数 |
作成日 |
作成者 |
承認 |
改訂内容 |
| A01 |
2002.12.15 |
岩部 |
小山 |
初版 |
1 目的
システム主要構成部品のひとつである赤外線センサについてその基本性能及び特性を調査、理解し、MIRSにおける利用方法を検討する。
2 赤外線とは
- 肉眼で直接観測できない。
- 低い温度の物体から放射される。
- 波長が長い。
- 物体に対する吸収係数が大きい。
赤外線の種類は波長によって近赤外(0.7~3μm)、中赤外(3~6μm)、遠赤外(6~15μm)、超遠赤外(15~1000μm)に分類される。近赤外線の領域は、赤外線受光素子として汎用になっている半導体のシリコンやゲルマニウムが使用できるため、小型の発光ダイオードに用いられている。
ノイズ対策(符号化信号の利用)
過去のMIRSの実績では、外部光(日射、撮影用ライト)によるノイズにより赤外線を誤認識する場合があった。
符号化信号を利用することにより、発信器からのノイズを確実に処理することが可能である。
信号処理の方法としては、
・符号化信号を平滑化する前の信号をFPGA内のメモリに記憶させて、RT‐taskにより定期的にそのデータを取り出し、規定のパターンと一致しているかを確認する。
・符号化信号を平滑する段階で、信号パターンが規定のコードと一致しているかをハードウェア的に認識させ、一致していた場合のも、その後の処理を行うようにさせる。
などが考えられる。
3 赤外線センサの種類
◎量子型
フォトンを吸収しキャリアを励起することによって直接赤外線を検出するセンサである。このセンサは後に述べる熱型センサより100~1000倍の検出能力を持つが、動作温度が低いため通常は液体窒素などで冷却の必要があるため、MIRSでの利用は望めない。
◎熱型
エネルギー吸収による温度変化を利用するもの。素子としては、サーモパイル、サーミスタ・ボロメータ、焦電形素子などがある。特に焦電形素子は比較的感度が高く、構造が簡単なのでよく用いられる。
- サーモパイルセンサ
…サーモパイルセンサの大きな特徴は、紫外線から遠赤外線までの広い波長領域で、直流の出力信号が得られる。分光感度は窓材の特性のみに影響されるので、ある特定の波長領域でのみ使用したい場合は、雑音を少なくする意味で窓材がフィルタとして用いられる。感度はInSbとTeを熱電対に用い、集積化することにより、700V/Wが得られる。
しかし、周囲の温度が1℃変化すると、0.2~0.4%感度が変わるので出力が変化する。したがってこれを補償する回路が必要である。
- 焦電形センサ
…焦電形の大きな特徴はインピーダンスが1011Ω以上と非常に高いことである。このため外部雑音の影響を受けやすいので、増幅器をセンサに内蔵するのが良いが、内蔵する増幅器の入力インピーダンスは非常に高いことが必要である。
また、高感度なセンサを得るには、焦電体の熱容量を小さくし、焦電体からの熱放散量を少なくすることが必要である。
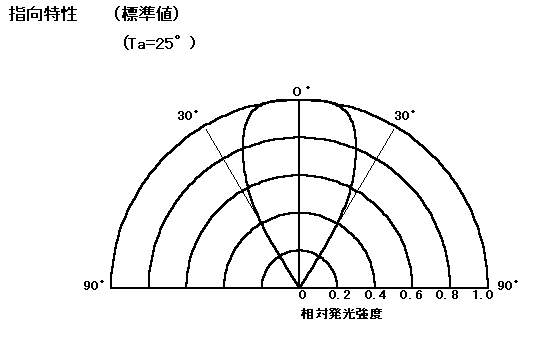
4 指向特性
◎送信機側の指向特性
* 理論値による指向特性 *
赤外線受信機の指向特性について
性能
赤外線受信機は、受信した光の強度を測定できないため、送信機と受信機の間の距離を知ることは出来ない、つまり、得られる情報は少ないのである。
図1に示す送信機を用いて、図2の光学系においてリモコンセンサの出力信号が下記の各項目を満足すること。
直線受信距離特性
図2において、L=0.2~5m、Ee<10lx(※3)、φ=0°のとき、出力信号が1ー4項の電気的特性を満足すること。
指向角受信距離特性
図2において、L=0.2~3m、Ee<10lx、X方向φ≦30°、Y方向θ=0°のとき1ー4項の電気的特性を満足すること。
又、L=0.2~3m、Ee<10lx、X方向φ=0°、Y方向θ≦15°のとき1ー4項の電気的特性を満足すること。
※3) 受光面照度を示す。
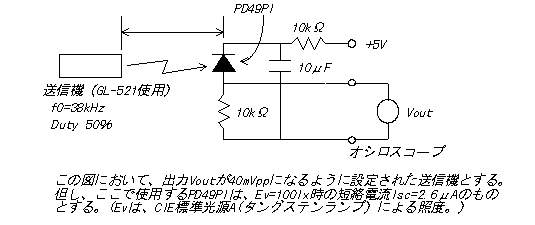 |
| 図1 送信機 |
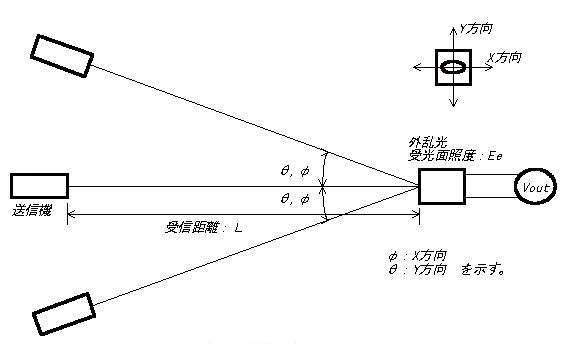 |
| 図2 光学系 |
理論値による赤外線受信機の指向特性
1-6 指向角特性
.jpg) |
| X方向特性 |
.jpg) |
| Y方向特性 |
5 赤外線センサー
- 使用素子・<発光側>赤外線LED TLN105B
◎特徴
放射強度が大きい。
指向特性が広い。
光出力の直線性が良く、パルス動作、高周波による変調が可能。
・<受光側> SHARP IS1U60
- 発光側の定格及び特性
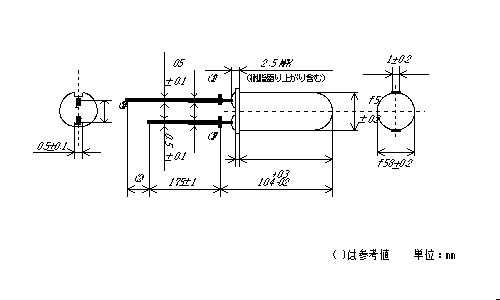
- 外観
- 最大定格
最大定格(Ta=25)| 項 目 | 記号 | 定格 | 単位 |
| 直流順電流 | IF | 100 | mA |
| 直流順電流低減率(Ta>25℃) | ΔIF/℃ | -1.33 | mA/℃ |
| パルス順電流 | IFP(注) | 1 | A |
| 直流逆電圧 | VR | 5 | V |
| 許容損失 | PD | 150 | mW |
| 動作温度 | Topr | -20~75 | ℃ |
| 保存温度 | Tstg | -30~100 | ℃ |
(注)パルス幅≦100μs、繰り返し周波数=100Hz - 電気的特性
電気的特性(Ta=25℃)| 項目 | 記号 | 測定条件 | 最小 | 標準 | 最大 | 単位 |
| 順電圧 | VF | IF=100mA | --- | 1.35 | 1.5 | V |
| 逆電圧 | IR | VR=5V | --- | --- | 10 | μA |
| 放射強度 | IE | IF=50mA | 12 | 20 | --- | mW/sr |
| 光出力 | PO | IF=50mA | --- | 11 | --- | mW |
| 端子間容量 | CT | VR=0,f=1MHz | --- | 20 | --- | pF |
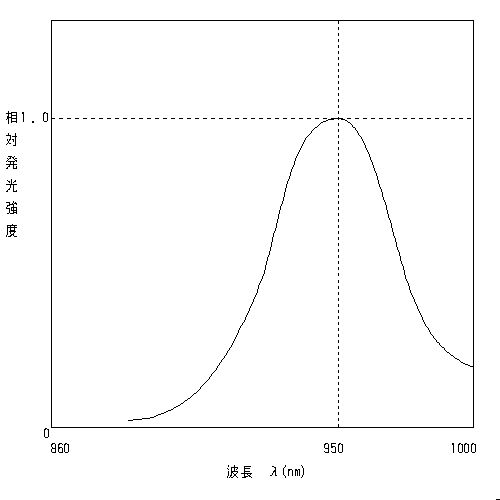
| ピーク発光波長 | λP | IF=50mA | --- | 950 | --- | nm |
| スペクトル半値幅 | Δλ | IF=50mA | --- | 50 | --- | nm |
| 半値角 | θ1/2 | IF=50mA | --- | ±23.5 | --- | ° |
- 波長特性(標準値、IF=50mA、Ta=25℃において)
- 製作における注意
- リードフォーミングは、リード線のストッパ部より先端部分で、素子に跡が残らないように曲げ、その後に半田付けする。
- 半田付けは、リード線のストッパ部より先端部分で行う。
- 半田付けの温度は、260℃以下。時間は5秒以下とする。
- 受光側の定格及び特性
- 外形
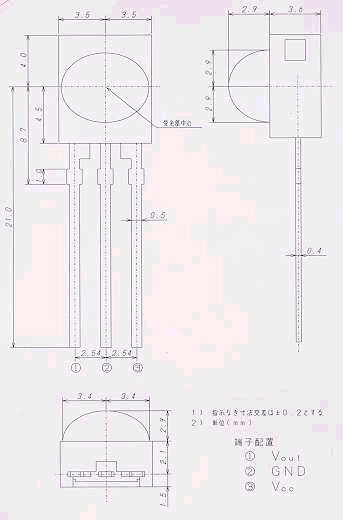
- 4-1 IS1U60外形図
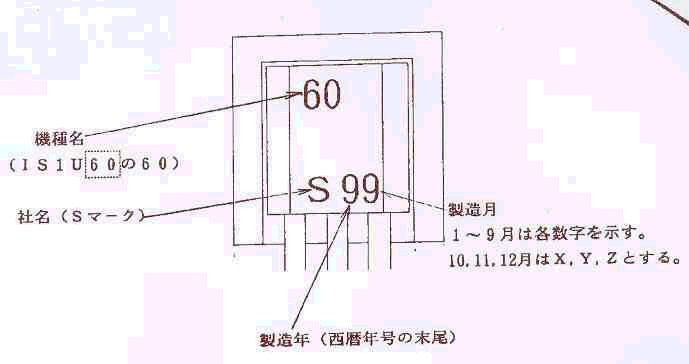
- マーク図
- 定格
3-1.構成図
3-2.絶対最大定格
| 項目 | 記号 | 定格値 | 単位 |
|---|
| 電源電圧 | VCC | 0~6.0 | V |
| 動作温度 | Topr | ※1 -10~60 | ℃ |
| 保存温度 | Tstg | -20~70 | ℃ |
| 半田温度 | Tsol | ※2 260 | ℃ |
※1 結露なきこと。 ※2 樹脂端面より下部の位置で5秒間3-3.推奨動作条件
| 項目 | 記号 | 動作条件 | 単位 |
|---|
| 電源電圧 | VCC | 4.7~5.3 | V |
3-4.電気的特性
| 項目 | 記号 | 最小 | 標準 | 最大 | 単位 | 備考 |
|---|
| 消費電流 | ICC | - | 2.8 | 4.5 | mA | 入力光なし、出力端子OPEN |
| Hレベル出力電圧 | VOH | ICC-20 | - | - | V | ※3、出力端子OPEN |
| Lレベル出力電圧 | VOL | - | 0.45 | 0.6 | V | ※3、プルアップ抵抗2.2kΩ |
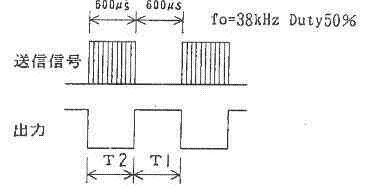
| Hレベルパルス幅 | T1 | 400 | - | 800 | μs | ※3 |
| Lレベルパルス幅 | T2 | 400 | - | 800 | μs | ※3 |
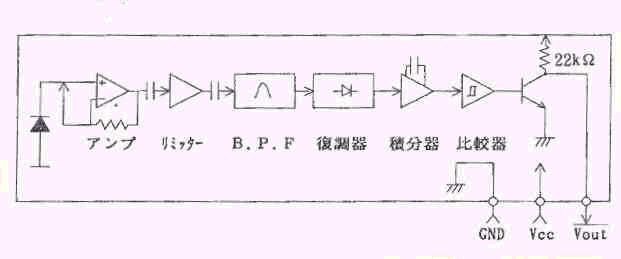
| B.P.F中心周波数 | f0 | - | 38 | - | kHz | |
下図に示すバースト波を、送信機にて送信するものとする。
回路構成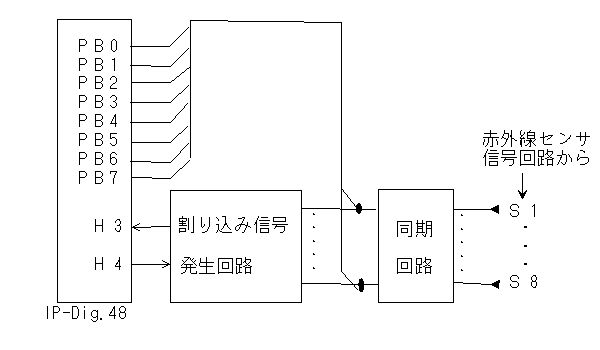
赤外線センサ信号処理回路
・割り込み信号部は、赤外線センサー受光部からの信号に変化が生じたときに割り込み信号を出すと思う。信号自体は、一発パルスではなく他の波形になると思われる。
考察
赤外線センサは、ポストのスイッチを探索するのに使われる。
受信機の指向特性は思ったよりも広い。
それはこの場合、探索性能が高いということではなく、誤差が大きいということである。
なんらかの工夫をして、指向性をなるべく直線にし、誤差を少なくしなければならない。
センサを壁で囲み、指向特性を小さくする、というのが現段階で考え付く方法である。
なるべくポストの近くを回るという手段もあるが、危険なのでなるべく避けたい。
センサを取り付けるときは、MILSの受信機をポストの送信機とを同じ位置に取り付けることができれば、それが一番射程が長いことになる。
私たちのMIRSでは順番通りにポストを獲得するようにするため、偶然にポストを獲得することを避けたい。そのためには進行方向にポストがあるということと、その方向にポストのスイッチがあるかないかを確認することが必要になってくる。できるだけはやくスイッチの存在を確認したいので受信機をポストの送信機と同じ位置に取り付けるべきである。