一般的に言う直流モーターであり、直流電源で回すことができる。 DCモーターは制御用モーターとして非常に優れた回転特性を有している。 例えば、大きな起動トルク、電圧変化に対するリニアな回転特性、入力電流に対する出力トルクの直線性、出力効率の良さなどおよそ制御用モーターに要求されるすべての性能を兼ね備えたモーターといえる。
※トルクとは、モーターの回転力のことであり、これが大きいほどその出力パワーも大きくなる。 ここでトルクとは日本語に訳すと回転力ということになるが、このトルクは直線運動における推進力に相当する。 また、トルクの単位は[kgf・m]で表されるが、これをSI単位系になおすと[N・m]になる。
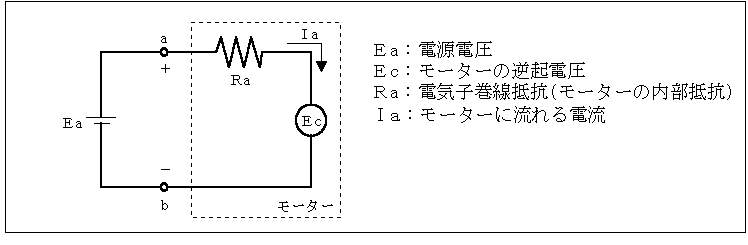
Ea=Ra×Ia+Ec
Eaが供給された直後はモーターが回転していないので、Ecは0である。従って モーター起動時の式は、
|
Ea=Ra×Ia
Ia=Ea÷Ra
である。Iaは、このモーターの起動時の電流であり、これがこのモーターの最大電流である。(この時モーターは最大トルクを生じる。最大トルクを生じるのはこの時と過負荷で動けない時であり、過負荷が最大トルクを上回っていて起動できない時、 W=Ia2×Ra のジュール熱を生じ、その熱によりモーターを損傷する恐れがある。
従って、負荷は最大トルクの30~50%位にする。)
T=Kt×Ia
これより、モーターに流れる電流は、
Ia=T÷Kt
となる。又、モーターの回転数Nは、逆起電圧Ecとほぼ比例する。
Ec(N)=Ea-Ra×Ia より、
N=Ec(N)/(Ec÷N')
[Ec(N):モーター仕様の逆起電圧C[V](N'[rpm])]
という関係がある。
τe=L/Ra (L:等価インダクタンス、Ra:巻線抵抗)
※時定数とは、変化の速度を表わす指標である。
電気的時定数とは、モータを拘束しておき、電機子に定電圧を印加してから電流がその飽和値の63%まで立ち上がるのに要する時間である。
これより、巻線抵抗が大きく、等価インダクタンスが小さければ良いことが分かる。
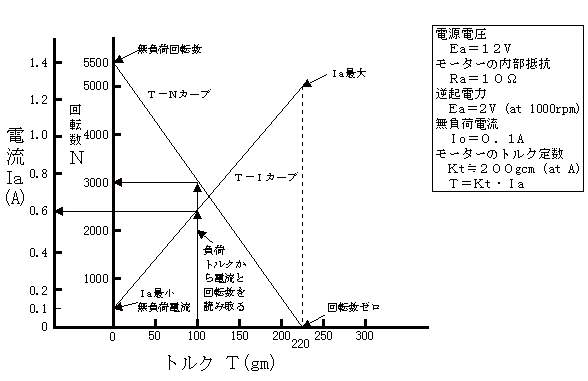
fig.2モーターのT-N,T-I曲線
τm=(Jm)/(Ke・Kt) (Jm:ロータイナーシャ、Ke:逆起電力定数
Ra:電機子巻線抵抗、Kt:トルク定数)
従って、Jm、Raは小さく、Ke、Ktを大きくすればよい。
※機械的時定数......
停止状態から無負荷回転数の63%まで加速するのに要する時間である。
理想的には、IとNは比例、TとNは逆の比例関係になるが、実際は、Nの上限で特性が曲がったり下限でリプルを生じる。従って、多スロット型、スロットレス型のモーターを選ぶ必要がある。
※(トルク)リプル...... 出力トルクの変動分を、平均トルクに対する百分率で示すもの。この値が大きいと軸振動や騒音がひどくなる。
スロット...... スロットとは、回転子鉄心の"溝
"である。これがあると、軸の固有振動数が変わるので、それによってモーターの振動との共振を避け、騒音を抑えられる。スロットレスモーターはスロットを持たないものをいうが、別名で平滑鉄心モーターともいう。
記号
名称
単位
記号
名称
単位
Tt
全発生トルク
N・m
Ea
電機子端子電圧
V
Ta
有効出力トルク
N・m
N
回転数
rps(rpm)
To
損失トルク
N・m
Ra
電機子抵抗
Ω
Nt
無損失時の無負荷回転数
rps(rpm)
Ec
逆起電圧
V
Na
無負荷回転数
rps(rpm)
η
効率
%
It
起動電流
A
ηm
最高効率
%
Io
無負荷電流
A
W
出力
W
Km
トルク定数
N・m/A
Wm
最高出力
W
ω
回転角速度
rad/sec
Ke
逆起電力定数
V/rpm

モータ型番 : RE025-055-34-EBA201A
定格出力
20[W]
最大連続トルク
24.45[mNm]
公称電圧
18.00[V]
公称電圧時最大出力
55200[mW]
無負荷回転数
10200[rpm]
最大効率
83.2[%]
停動トルク
219[mNm]
トルク定数
16.3[mNm/A]
回転数/トルク勾配
48.1[rpm/mNm]
回転数定数
585[rpm/V]
無負荷電流
53.9[mA]
機会的時定数
4.63[ms]
起動電流
13400[mA]
ロータ慣性モーメント
9.19[gcm2]
端子間抵抗
1.34[Ω]
端子間インダクタンス
0.12[mH]
最大許容回転数
11000[rpm]
熱抵抗(ハウジング/周囲間)
14.00[K/W]
最大連続電流
1500[mA]
熱抵抗(ロータ/ハウジング間)
3.10[K/W]