| 沼津高専 電子制御工学科 | ||||||
|
||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2003.05.02 | 小野田 | 山田 | 初版 | ||
| 赤外線センサとは、照射光(MIRSでは赤外線センサLEDにより放射)のフォトン(光子)エネルギーを何らかの形で変換し、電気的に扱えるようにするものである。 |
|
・人間の視覚を刺激しないでものを見ることができること ・対象物の温度を遠くから比接触で瞬時に測定できること |
|
・フォトンを吸収しキャリアを励起することによって直接赤外線を検出するセンサ。 ・熱型センサより100〜1000倍の検出能力を持つ。 ・しかし、動作温度が低いために通常は液体窒素などで冷却の必要がある。 よって、MIRSでの使用は不可能である。 |
|
・すべての波長において使用できる受光素子。 「焦電型」「サーモパイル」「サーミスタ」など。 ・これらの素子は、赤外線エネルギーを熱として吸収し、 それによる温度上昇で表面電荷や熱起電力、 ・量子型素子と違って常温での動作が可能だが、感度が低く、 焦電型を除いては応答速度が遅いという短所がある。 |
| 赤外線LED TLN105B ・特徴 ・放射強度が大きい。 ・指向特性が広い。 ・光出力の直線性が良く、パルス動作、高周波による変調が可能。 |
|
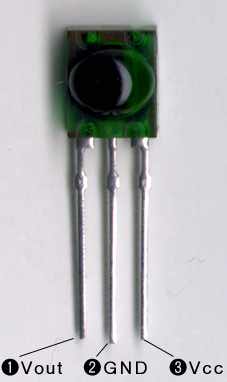
IS1U60 ・特徴 ・OPICによる1パッケージ化を実現 ・電磁シールド内蔵により、電磁ノイズの影響を受け難い ・BPF、中心周波数調整済み(38KHz固定) ・非球面レンズ採用 以下にこの素子の写真を添付する。 |
|
| 理論値による射程距離及び指向特性は以下の図のようである。 |
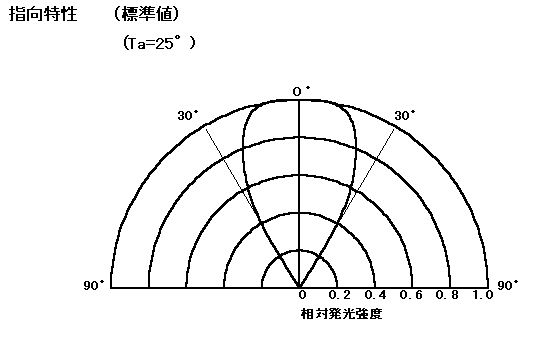 |
| 直線送信距離は1.0m、指向角送信距離は0.6mであり、指向性は 60度である。 |
|
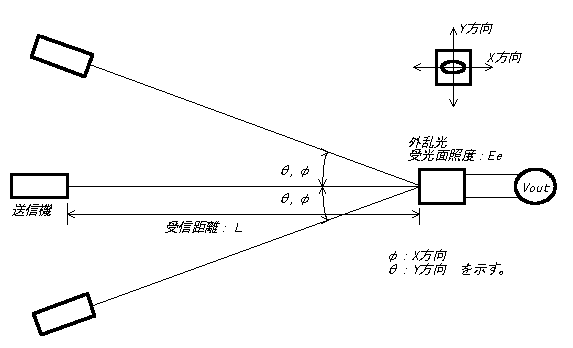
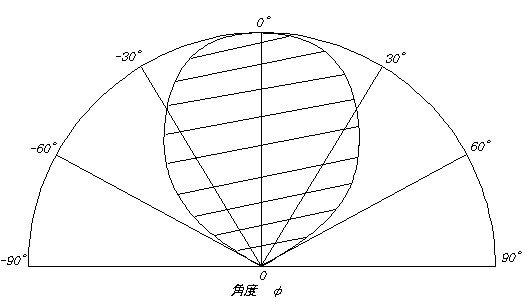
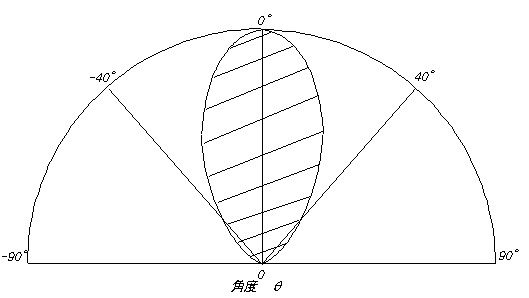
理論値による射程距離及び指向特性は以下の図のようである。 |
 |
 |
 |
|
直線受信距離(Φ=0度)はL=0.2〜5.0m、指向角受信距離はL=0.2〜3.0mであり、 X方向指向性は60度(-30度≧Φ≦30度、θ=0度) Y方向指向性は30度(Φ=0度、 -15度≧θ≦15度)である。 |
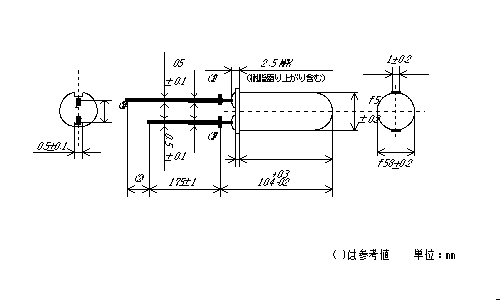
2.5.1 外観 |
 |
2.5.2 最大定格
(注)パルス幅≦100μs、繰り返し周波数=100Hz 2.5.3 電気的特性
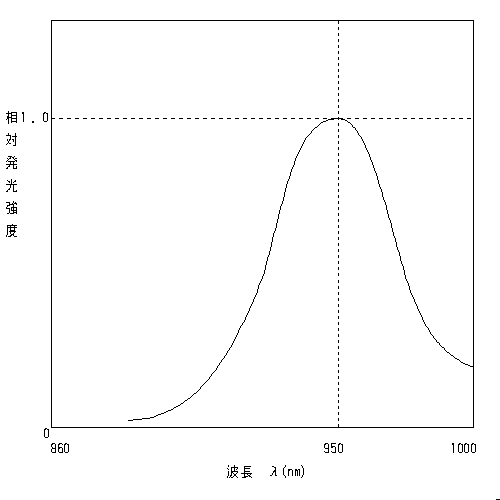
2.5.4 波長特性 (標準値、IF=50mA、Ta=25℃において)
2.5.5 製作における注意 ・リードフォーミングする時は、リードのストッパ部より先端部分で、 素子本体にフォーミングストレスが残らないように曲げ、 半田付けはリードフォーミングのあとで実施すること。 ・半田付けは、リード線のストッパ部より先端部分で行う。 ・半田付けの温度は、260℃以下。時間は5秒以下とする。 |
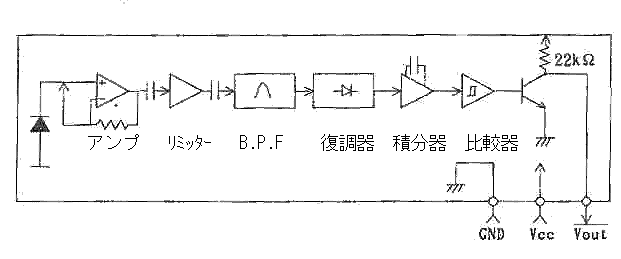
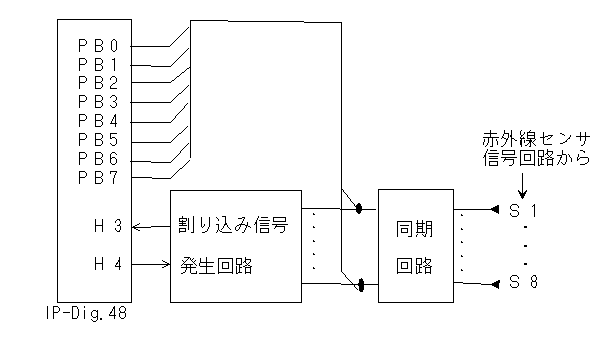
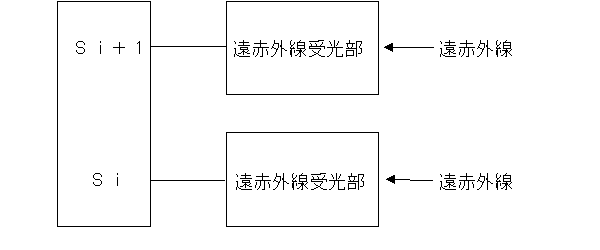
2.6.1 構成図
2.6.2 絶対最大定格
2.6.3 推奨動作条件
2.6.4 電気的特性
|
 |
 |
|
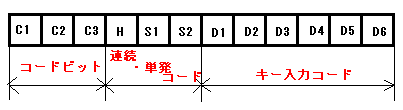
4.1 伝送命令 ポストが何番かを示す伝送命令は、次のような、1ワード12ビットの構成になっている。
|
|||||||||
|
4.2 コードビット コードビットとは、赤外線の信号をいろんな機種で対応できるようにする為のコード。 |
|||||||||
|
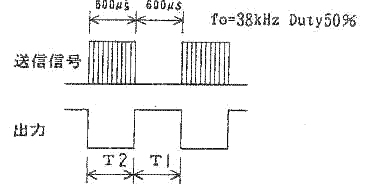
4.3 連続・単発信号&コード 伝送命令には、単発信号と連続信号による、信号伝達方法がある。
|
|||||||||
|
4.4 データコード 下位の6ビットの0,1信号を変化させる事によって、ポストから出力される送信波が変化して各ポストにナンバーをつけることができる。また、MIRSもこの送信波形を頼りに、目的のナンバーのポストを探し出す事ができる。 |
|||||||||
|
4.5 送信波形 送信基本波形(今回は発信周波数が455KHz)は、次のように表される。 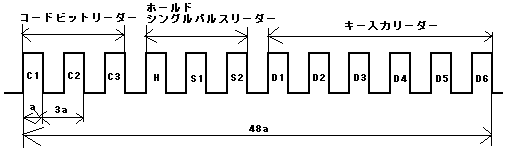 各ビットの時間aは発信周波数fxにより決定されている。
|
|||||||||
|
4.6 ビット0,1の区別 送信基本波形の各、コードの0,1は次のように表されている。 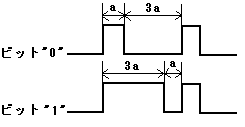 |