- 一般的なPWM制御
- mirsにおけるPWM制御
- 回路構成
- PWM制御の仕組み
- Duty比
- PWM制御の長所と短所
- offTimeの逆起電力問題
PWM制御
- 一般的なPWM制御
PWM(Pulse Width Modulation)とは振幅を一定にしてパルス幅を変化させるパルス制御法の一種(発展形)である。パルスの前縁と後縁の両端を等しく変化させる方法とどちらか一方(普通は後縁)を変化させる方法の2つがある。
- MIRSにおけるPWM制御
普通DCモータの場合、回転数は電圧比で制御する方法が一般的である。しかしMIRSの場合は、モータ回転数制御をPWM制御によって行っている。
- 回路構成
MIRSでは2つのタイヤの回転数を変えて舵取りも行っているため、それぞれのモータから送られるデータとして極性(方向データ)・回転数(速度データ)がある。方向データは1bit(正転・反転)で、速度データは7bit(128段階)である。
右速度・方向データは68230のpartAから、左速度・方向データはportBから送られてくる。カウンタのClockは68230のToutから得ている。
PWM信号発生回路では、カウンタより得られた8bitのカウント値(のこぎり波)と7bitの速度データ(入力信号)との比較をコンパレータで行うことによりPWM信号(パルス)を形成している。PWM信号はデジタル信号である。
PWM回路からモータ制御ボードに送られたPWM信号はモータ制御ボードでモータを駆動するアナログ信号に変換される。また、モータ制御ボードで、PWM回路からの方向データに応じてモータにかかる電圧の極性が変化し、MIRSの前進・後退・回転が制御されている。
図1にI/Osubボード上のPWM回路の回路構成図を示す。データは図の左から右へ動き、MPC(モータ制御部)につながっている。
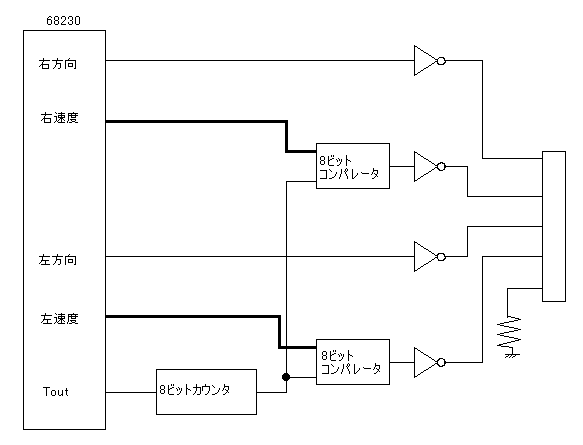
図1.回路構成図 - PWM制御の仕組み
DCモータの場合、図2のようにモータと電源とスイッチをつなぎ、スイッチのON OFFでモータを動かす方法が一般的である。モータのトルク(回転力)は供給電圧の変化(電圧比)で制御される。この方法ではモータのトルクは電源がおちてくればその影響を受けてトルクが弱まってくる。そのため、MIRSのように電源を内部の電池のみにたより、電力消費量が多い自律移動ロボット等にはあまり適さない。
では電源電圧を一定にして、スイッチの方を連続的に切り替えてみる。すると速度が上がりきる前に電力の供給が止まり、減速しきる前に電力の供給が再開する。ON OFFの間隔を調節すれば、モータのトルクを制御できる。このように慣性を使い、オンパルスの通電幅を変化させることによって、結果的にモータへの供結エネルギーをコントロールする制御法をPWM制御という。
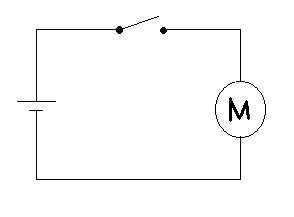
図2.モーターの電圧制御
実際にはスイッチのON OFFではなくて、アナログ信号とトランジスタで制御している。またMIRSの場合I/Osubボードからの入力信号の大きさに応じてPWM信号が形成されている。
図3がMIRSのPWM制御の概略図である。また図のダイオードが後述するフライホイールダイオードで、詳しくはオフタイムの逆起電力問題の項目でのべる。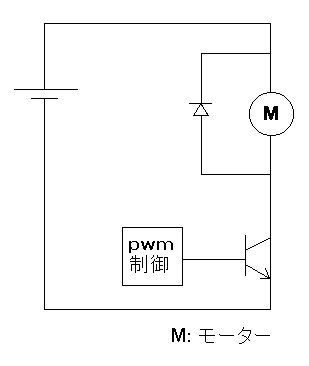
図3.モーターのPWM制御
- Duty 比
デューティー比とはキャリア周期に対するオンタイムの比のことである。この比率を変えることによってモータへ供給する平均電流を変化させ、モータの回転数を制御する。
3年後期の電子制御工学実験でMIRSの運動解析を行った。そのとき、Duty比45~50%程度で十分な速度が得られていた。
MIRSの速度をあまり大きくすると、電力を無駄に消費することにもなる。
また、Duty比は50%以上になると、回転数の変化が少なくなるので結果的に速度の変化が少なくなる。したがってDuty比は静止状態の0%から最大でも50%、すなわちオンタイムの幅がオフタイムの幅より大きくなることがないように設定してある。
また、Duty比を1%ごとに制御するとあまり細かく制御できない。そこで0~50%を前述したように7bit分、つまり128段階にわけて制御することによって、より精密な制御を可能としている。
速度データをnとするとPWM信号のパルス幅TとDuty比Dの関係は次式である。
T[μs]=(n+1)×5[μs] D[%]=(n+1)/256×100
0≦n≦127
- PWM制御の長所及び短所
- PWM制御の利点として
1.電力ロスが少ない
2.発熱が少ない
3.必要時間のみ通電するので効率がいい
また欠点としてオフタイムの逆起電力問題がある。
- OffTimeの逆起電力問題
PWM制御などのパルス制御法は、電力パルスがonの時だけモータ電流を流していて、電力パルスがoffのときはモータ電流は流れない。したがって、OffTimeとOnTimeではトランジスタ等の負担に差が生じる。
また、コイルにはインダクタンスがあるため自己誘導作用が発生し、大きな逆起電力を誘発する。これは、制御用トランジスタを破壊するだけでなく、非常に大きな雑音を周囲に巻き散らし、ひいては大きな電磁波被害となる。これを解決したのがダイオードD1で、一般にこれをフライホイールダイオードと呼んでいる。この働きは、モーターオフ時に誘発する逆方向の電力をダイオードを介して同じモータに回生してやる事である。こうすることによって、高レベルの電気雑音が抑制されるだけでなく、そのエネルギーをオフタイム中、モータに流す事が出来るので、モーター電流が連続的となり、その結果エネルギー効率が上がり、なおかつモーターの動きもスムーズになる。
- MIRSにおけるPWM制御
- 一般的なPWM制御