| 徖捗崅愱 揹巕惂屼岺妛壢 | ||||||
| ||||||
| 夵掶婰榐 | ||||||
|---|---|---|---|---|---|---|
| 斉悢 | 嶌惉擔 | 嶌惉幰 | 彸擣 | 夵掶撪梕 | ||
| A01 | 2001.11.20 | 慡堳 | 拞郪 | 弶斉 | ||
| A02 | 2001.11.22 | 慡堳 | 拞郪 | 恾偺揬傝晅偗 | ||
| 僙儞僒柤徧 |
屄悢 |
| 挻壒攇僙儞僒(憲庴) |
2 |
| 愒奜慄僙儞僒 |
3 |
| 愒奜慄敪怣 |
1 |
| 僞僢僠僙儞僒 |
6 |
| 僙儞僒柤徧 |
僙儞僒攝抲 |
栶妱 |
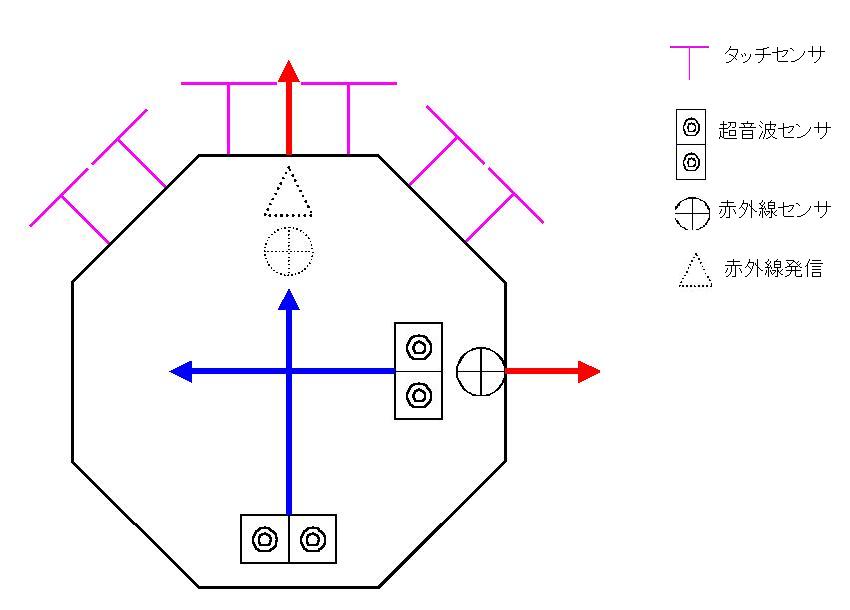
| 挻壒攇僙儞僒(憲庴怣) |
儃僨傿屻晹 儃僨傿塃懁柺晹 |
億僗僩扵嶕偺偨傔偵恑峴曽岦嵍懁偵挻壒攇傪弌偡昁梫偑偁傞丅傑偨挻壒攇僙儞僒偼20cm埲撪偼扵抦偱偒側偄偨傔丄嵍懁柺傛傝20cm掱搙撪懁偵愝抲偡傞昁梫偑偁傞丅埲忋傛傝丄塃懁柺偵挻壒攇僙儞僒傪愝抲偡傞丅 傑偨丄屻晹偵愝抲偟偨恑峴曽岦偵懳偡傞挻壒攇僙儞僒傪巊梡偟丄億僗僩傑偱偺嫍棧應掕偲億僗僩埵抲妋擣傪偡傞丅 |
| 愒奜慄僙儞僒(庴怣) |
儃僨傿塃懁柺晹 儃僨傿慜柺晹 儃僨傿慜柺壓晹 |
塃懁柺偺愒奜慄僙儞僒偱丄億僗僩廃夞拞偵億僗僩偐傜偺怣崋傪庴怣偡傞丅 慜柺晹偺愒奜慄僙儞僒偱丄億僗僩愙嬤帪偵岆偭偰妉摼偟側偄傛偆偵偡傞丅傑偨丄妉摼摦嶌屻偵妋幚偵僗僀僢僠傪墴偟偨偐傪敾抐偡傞丅 慜柺壓晹偺僙儞僒偱敀慄傪専弌偡傞丅 |
| 僞僢僠僙儞僒 |
儃僨傿慜柺亊2 儃僨傿慜柺嵍塃45亱 偺柺偵偦傟偧傟2偮 |
寁6僇強愝抲偡傞帠偱丄偳偺妏搙偱億僗僩偵愙怗偟偨偐偑妋擣偱偒傞丅 |
| 愒奜慄敪怣 |
儃僨傿慜柺壓晹 |
彴偵岦偗偰愒奜慄傪弌椡偟丄摨偠偔慜柺壓晹偵愝抲偟偰偄傞愒奜慄僙儞僒偱偦偺愒奜慄傪庴怣偟丄斀幩棪偺堘偄偱敀慄偲彴傪敾抐偡傞丅 |
| 娭楢暥彂 |
|---|