3.モータの特性カーブ/性能
モーターのトルクをあげるにはモーターの原理から
②固定磁石の磁界を強くする。(強力な磁石に変更する。)
③コイルの巻き数を多くする。
④ブラシの接触抵抗を下げる。
⑤回転数を上げギヤ比を多くする。
などが考えられる。ただし回転数をあげることと、モーターのトルクをあげることは逆の操作なので無駄にトルクがあると良くない(回転数が下がるため)。また。回転数が高すぎても良くない(マシンが動かなくなるため)。もしも改造をするときは自分たちのマシンのことを良く考慮する必要がある。
また必要なトルクを得るためには減速機(ギヤ比)のことも考慮しなければならない。
またモーターを含めた駆動系の善し悪しはモーターの特性だけではなくほかの要因もある。それはモーターの電気的な起動特性や機械的な起動特性も考えられるからである。これはモーターがコイル、つまりインダクタンスの成分を持っているため、モーターが動き始め、一定の速度になるまでの電圧の上がり方などはeの関数の形を持つからである。そしてその曲線が最終値の63%になるまでの時間を時定数といい、これを小さくすることで最終値、つまり安定した値になるまでの時間を小さくすることが出来る。
これより、巻線抵抗が大きく、等価インダクタンスが小さければ良いことが分かる。
・機械的時定数τm
where:
Jm:ローターイナーシャ
Ra:巻線抵抗
Ke:逆起電力定数
KT:トルク定数
このことよりJm,Raは小さく、Ke,KTを大きくすればいい。
また次のようなこともモーターの選定のときに考えるとよい。
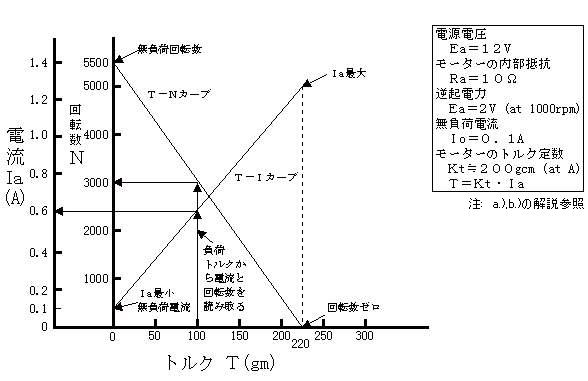
・N-Tカーブのリニアリティをよくする。理想的にはトルクTと電流iは比例、トルクTとN
負の比例関係になるが、実際は、Nの上限で特性が曲がったり、下限でリプルを生じる。したがって、多スロット型、スロットレス型のモーターを選ぶ必要がある。
*リプル・・・・出力トルクの変動分を、平均トルクに対する百分率で示すもの。この値が大きいと軸振動や騒音がひどくなる。
*スロット・・・・スロットとは、回転子鉄心の"溝"である。これがあると、軸の固有振動数が変わるので、それによってモーターの振動との共振を避け、騒音を抑えられる。スロットレスモーターはスロットを持たないものをいうが、別名で平滑鉄心モーターとも言う。
-解説
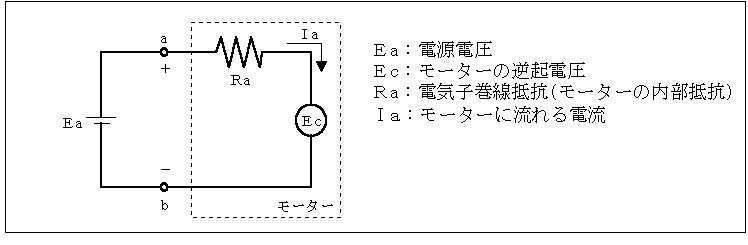
a.)DCモータの基本
電源電圧がモーターに供給されている時の関係式は、
Ea=Ra×Ia+Ec
Eaが供給された直後はモーターが回転していないので、Ecは0である。従ってモーター起動時の式は、
 |
Ea=Ra×Ia
Ia=Ea÷Ra
である。Iaは、このモーターの起動時の電流であり、これがこのモーターの最大電流である。(この時モーターは最大トルクを生じる。最大トルクを生じるのはこの時と過負荷で動けない時であり、過負荷が最大トルクを上回っていて起動できない時、 W=Ia2×Ra のジュール熱を生じ、その熱によりモーターを損傷する恐れがある。
従って、負荷は最大トルクの30~50%位にする。)
4.MIRSで使用するモータのデータ
maxon DC モータ
| 定格出力 | 20[W] | 最大連続トルク | 24.45[mNm] |
| 公称電圧 | 18.00[V] | 公称電圧時最大出力 | 55200[mW] |
| 無負荷回転数 | 10200[rpm] | 最大効率 | 83.2[%] |
| 停動トルク | 219[mNm] | トルク定数 | 16.3[mNm/A] |
| 回転数/トルク勾配 | 48.1[rpm/mNm] | 回転数定数 | 585[rpm/V] |
| 無負荷電流 | 53.9[mA] | 機会的時定数 | 4.63[ms] |
| 起動電流 | 13400[mA] | ロータ慣性モーメント | 9.19[gcm2] |
| 端子間抵抗 | 1.34[Ω] | 端子間インダクタンス | 0.12[mH] |
| 最大許容回転数 | 11000[rpm] | 熱抵抗(ハウジング/周囲間) | 14.00[K/W] |
| 最大連続電流 | 1500[mA] | 熱抵抗(ロータ/ハウジング間) | 3.10[K/W] |
運転範囲
5.予備知識
| 記号 | 名称 | 単位 | 記号 | 名称 | 単位 |
| Tt | 全発生トルク | N・m | Ea | 電機子端子電圧 | V |
| Ta | 有効出力トルク | N・m | N | 回転数 | rps(rpm) |
| To | 損失トルク | N・m | Ra | 電機子抵抗 | Ω |
| Nt | 無損失時の無負荷回転数 | rps(rpm) | Ec | 逆起電圧 | V |
| Na | 無負荷回転数 | rps(rpm) | η | 効率 | % |
| It | 起動電流 | A | ηm | 最高効率 | % |
| Io | 無負荷電流 | A | W | 出力 | W |
| Km | トルク定数 | N・m/A | Wm | 最高出力 | W |
| ω | 回転角速度 | rad/sec | Ke | 逆起電力定数 | V/rpm |
b.)DCモーターの特性を算出する公式
Tt=Ta+To=Ke・I
[全発生トルク]=([有効出力トルク]+[損失トルク])=[逆起電力定数]・[電流]
Ec=Ke・ω
[逆起電圧]=[逆起電力定数]・[回転角速度]
Ea=Ec+Ra・I
[電機子端子電圧]=[逆起電圧]+[電機子抵抗]・[電流]
N=Na・(1-[T/Ta])=Nt・(1-[T/Tt])
[回転数]=[無負荷回転数]・(1-(T/[有効出力トルク]))=[無損失時無負荷回転数]・[1-(T/[全発生トルク])]
ω=(Ea-Ra・I)/Ke=(Ea/Ke)-((Ra・To)/Ke2)-((Ra・T)/Ke2)
[回転角速度]=(([電機子端子電圧]-[電機子抵抗]・[電流])/[逆起電力定数])-(([電機子抵抗]・[損失トルク])/[逆起電力定数]2)-(([電機子抵抗]・[トルク])/[逆起電力定数]2)
η=(2πNT)/(EaI)
[効率]=(2π・[回転数]・[トルク])/([電機子端子電圧]・[電流])
参考文献
・maxon motor・MIRS0005のモータ技術調査