| 沼津高専 電子制御工学科 |
| モータ調査報告書 |
| MIRS0102-TECH-0009 |
|
| 改訂記録 |
|---|
版数 |
作成日 |
作成者 |
承認 |
改訂内容 |
提出先 |
| A01 |
H13/12/17
|
田代充良
|
増田優 |
初版 |
|
モータ
モーターの原理
MIRSに使われるモーターはDCモーターと呼ばれるものでその構造はモーター内に固定された永久磁石(マグネット)と、鉄心にコイルを巻いたアマチュア(ローターとか電機子と呼ばれる)からなる。このアマチュアは2,3くらいにわかれ、このわかれた1つ1つを極と呼び、極が2つのものは2極モーター、3つのものは3極モーターと呼ぶ。そしてこの極にコイルが巻かれている。アマチュアのコイルには整流子(コミュテータ+ブラシ)と呼ばれる機械的接点を介して電流が供給される。永久磁石により作られた磁界の中にコイルが置かれており、この磁界の強さとコイルを流れる電流の強さ、コイルの巻き数がモータの発生する取るに比例する。電流を流すことによりある極が磁石になりローターの回転が始まる。そして回転によってブラシの位置が変わり、次のコイルに電流が流れる。これを繰り返すことにより、モーターは回転を続けるのである。電気的には下記に示すようにフレミングの左手の法則でまずトルクが発生する。モーターが回り始めると今度は磁界の中をコイルが動くことになる。これによりこのコイルにはフレミングの右手の法則によって電圧が発生する。この電圧のことを逆起電力といい、この伝あるを外部から加える電圧から引いた電圧に対応してコイルに電流が流れることになる。この差し引いた電流によってモーターに発生するトルクが決まる。したがってこの逆起電力が大きいとモータの最高回転数は低くなる。数式で表すと次のようになる。
1.モーターに発生する力Fはフレミングの左手の法則より
F(t)=2πrNBi(t)=KTi(t)
Nはコイルの巻き数
rはコイルの半径
i(t)は電流
Bは磁速密度
KT=2πrNB:トルク定数、推力定数
2.電気系の方程式はキルヒホッフの法則により次式が成り立つ。
Ld(i)/dt+Ri(t)=E(t)-ei(t)
L、Rはコイルのインダクタンスと抵抗
E(t)はコイルへの印加電圧
ei(t)は逆起電力でフレミングの右手の法則より
ei(t)=2πrNBv(t)=Kev(t)
なお
v(t)はコイルの移動速度
Ke=2πrNB:逆起電力定数
上のことより次のことが考えられる。
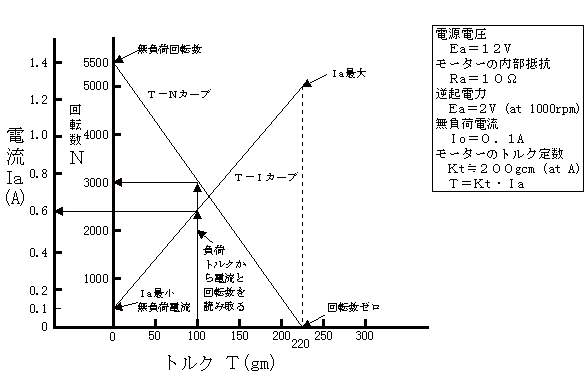
トルクはFに比例するのでフレミングの左手の法則より、i(t)に比例することが分かる。また回転数Nはコイルの移動速度v(t)がに比例する。そしてフレミングの右手の法則より逆起電圧eiと回転数Nが比例することが分かる。よって回転数Nがあがれば逆起電圧があがり、コイルを流れる電流i(t)が下がり、トルクが下がる。これはモーターの特性のグラフと一致する。
 ただしモーターの最高回転数をあげたかったら逆起電力を小さくすればいいので巻き数を少なくしてやればよい。これは電圧が下がるとグラフのT-N直線が傾きはそのままで下がってくるからである(アームの調査にも書いた)。これはラジコン用の高出力モーターで用いられている。ただ逆起電力が小さいということは回っているモーターを止めにくくなることなのでブレーキがきかなくないます。そのため制御用サーボモータでは巻き数を大きくとり、ブレーキング効果でめりはりのきいた制御ができるようになっている。
ただしモーターの最高回転数をあげたかったら逆起電力を小さくすればいいので巻き数を少なくしてやればよい。これは電圧が下がるとグラフのT-N直線が傾きはそのままで下がってくるからである(アームの調査にも書いた)。これはラジコン用の高出力モーターで用いられている。ただ逆起電力が小さいということは回っているモーターを止めにくくなることなのでブレーキがきかなくないます。そのため制御用サーボモータでは巻き数を大きくとり、ブレーキング効果でめりはりのきいた制御ができるようになっている。
ここで分かったことからモータの改造1を考えてみる。
モーターのトルクをあげるにはモーターの原理から
①電流を多く流す(電圧を上げる。コイルの線形を太くする(抵抗を下げる)。)
②固定磁石の磁界を強くする。(強力な磁石に変更する。)
③コイルの巻き数を多くする。
④ブラシの接触抵抗を下げる。
⑤回転数を上げギヤ比を多くする。
などが考えられる。ただし回転数をあげることと、モーターのトルクをあげることは逆の操作なので無駄にトルクがあっても良くないし(回転数が下がるから)、回転数が高すぎても良くない(マシンが動かなくなるから)。もし改造をするときは自分たちのマシンのことを良く考慮する必要がある。
また必要なトルクを得るためには減速機(ギヤ比)のことも考慮しないといけない。
またモーターを含めた駆動系の善し悪しはモーターの特性だけではなくほかの要因もある。それはモーターの電気的な起動特性や機械的な起動特性も考えられるからである。これはモーターがコイル、つまりインダクタンスの成分を持っているため、モーターが動き始め、一定の速度になるまでの電圧の上がり方などはeの関数の形を持つからである。そしてその曲線が最終値の63%になるまでの時間を時定数といい、これを小さくすることで最終値、つまり安定した値になるまでの時間を小さくすることが出来る。
・モーターの電気的時定数(time constant)
τe=L/Ra (L:等価インダクタンス、Ra:巻線抵抗)
電気的時定数とは、モーターのローターに定電圧を印可してから、電流がその飽和値の63%まで立ち上がるのに要する時間である。
これより、巻線抵抗が大きく、等価インダクタンスが小さければ良いことが分かる。
*(ここでモーターが動き始めるときの電圧や電流などの話をする。モータが動き始めるときは逆起電圧が0である。(ローターが回転していないから。)なのでコイルにはとても大きな電流が流れることになる。これはモーターが動き始めるのに必要なことである。なぜなら静止しているものを動かすときは大きな力が要る。大きな電流が流れることにより大きな起動トルクが発生するのである。DCモーターが優れている点で起動トルクが大きい(つまり速くモーターが回り始める)とはこのことである。ただこの大電流はそのまま流しつづける大きいジュール熱が発生する。つまりコイルが焼き切れてしまう現象が起こる。これは軸が回転しない過負荷のときも、同じである。しかし、そうならないのは回転を始めたローターにやり逆起電力が発生し、コイルまたは抵抗にかかる電圧を減らし、流れる電流を減らすからである。なので回転数が安定してくると逆起電圧も安定してきて、これによりコイルを流れる電流が安定してくることが分かると思う。つまり電流が安定するまでの時間が回転数が安定するまでの時間であり、それはマシンの速度が安定するまでの時間でもあるのである。なので電流が安定するまでの時間は短くした方が良いのである。)
・機械的時定数τm
τm=(Jm・Ra)/(Ke・KT)
Jm:ローターイナーシャ
Ra:巻線抵抗
Ke:逆起電力定数
KT:トルク定数
機械的時定数とは停止状態から無不可回転数の63%まで加速するのに要する時間である。
このことよりJm,Raは小さく、Ke,KTを大きくすればいい。
また次のようなこともモーターの選定のときに考えるといい。
・N-Tカーブのリニアリティをよくする。理想的にはトルクTと電流iは比例、トルクTとN
負の比例関係になるが、実際は、Nの上限で特性が曲がったり、下限でリプルを生じる。したがって、多スロット型、スロットレス型のモーターを選ぶ必要がある。
*リプル・・・・出力トルクの変動分を、平均トルクに対する百分率で示すもの。この値が大きいと軸振動や騒音がひどくなる。
*スロット・・・・スロットとは、回転子鉄心の"溝"である。これがあると、軸の固有振動数が変わるので、それによってモーターの振動との共振を避け、騒音を抑えられる。スロットレスモーターはスロットを持たないものをいうが、別名で平滑鉄心モーターとも言う。
DCモーターの特性を表す記号
| 記号 |
名称 |
単位 |
記号 |
名称 |
単位 |
| Tt |
全発生トルク |
N・m |
Ea |
電機子端子電圧 |
V |
| Ta |
有効出力トルク |
N・m |
N |
回転数 |
rps(rpm) |
| T0 |
損失トルク |
N・m |
Ra |
電機子抵抗 |
Ω |
| Nt |
無損失時の無負荷回転数 |
rps(rpm) |
Ec |
逆起電圧 |
V |
| Na |
無負荷回転数 |
rps(rpm) |
η |
効率 |
% |
| It |
起動電流 |
A |
ηm |
最高効率 |
% |
| I0 |
無負荷電流 |
A |
W |
出力 |
W |
| Km |
トルク定数 |
N・m/A |
Wm |
最高出力 |
W |
| ω |
回転角速度 |
rad/sec |
Ke |
逆起電力定数 |
V/rpm |
最後にモーターの資料を乗せる。
モータ型番 : RE025-055-34-EBA201A
モータデータ
| 定格出力 | 20[W] | 最大連続トルク | 24.45[mNm] |
| 公称電圧 | 18.00[V] | 公称電圧時最大出力 | 55200[mW] |
| 無負荷回転数 | 10200[rpm] | 最大効率 | 83.2[%] |
| 停動トルク | 219[mNm] | トルク定数 | 16.3[mNm/A] |
| 回転数/トルク勾配 | 48.1[rpm/mNm] | 回転数定数 | 585[rpm/V] |
| 無負荷電流 | 53.9[mA] | 機械的時定数 | 4.63[ms] |
| 起動電流 | 13400[mA] | ロータ慣性モーメント | 9.19[gcm2] |
| 端子間抵抗 | 1.34[Ω] | 端子間インダクタンス | 0.12[mH] |
| 最大許容回転数 | 11000[rpm] | 熱抵抗(ハウジング/周囲間) | 14.00[K/W] |
| 最大連続電流 | 1500[mA] | 熱抵抗(ロータ/ハウジング間) | 3.10[K/W] |
運転範囲
参考資料
1.ロボコンマガジン6
2.トランジスタ技術スペシャルNo.61
3.MIRS9802 kudou.html