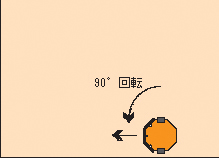
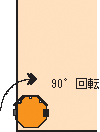
1.スタートしたら左に90°回転する。
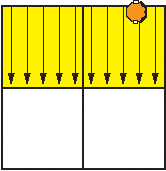
2.白線を感知するまで直進する。
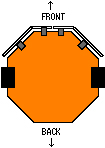
3.白線を感知したら、右に90°回転し、バックして後ろのセンサで白線を感知する。

4.その点を(0,0)とする。
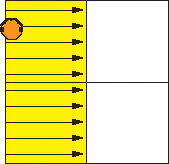
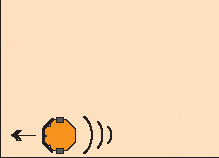
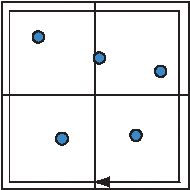
5.白線に沿い直進する。(この間超音波センサとロータリーエンコーダにより、ポストの位置を確認)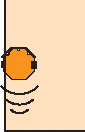
6.次の白線を感知したら、右に90°回転し、そのまま白線に沿い直進。
7.2~6を順に行い、(0,0)とした点まで戻る。
8.競技場のわくに沿い、一周目で超音波センサが反応した位置まで移動し、右に90°回転する。
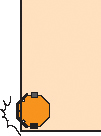
9.そのまま直進し、ポストにぶつける。
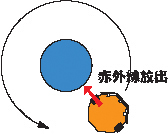
10.ポストの中心部を求め、ポストの回りを回転する。そのときに、ポストから出ている赤外線を感知し、番号を確認する。
11.ポストを一回転したあと、90°右に回転し、白線まで戻る。
12.以上の行動を、各ポストにおいて繰り返し、(0,0)とした点まで戻る。
注)二周目で、ポスト番号を確認する際、時間短縮のため1番ポストは見つけ次第獲得する。その後、順にポストを獲得できるような配置であれば、その場で獲得する。
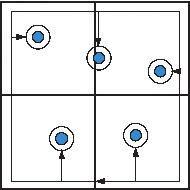
13.ポストの番号と位置が分かっているので、ポストを番号順に獲得していく。