一般的なロータリーエンコーダの使用方法は、回転子の回転数の検出、 更に、回転子の速度の検出である。
その二つを組み合わせることによってアナログ量であるモータの回転数をディジタル量でカウントしている。MIRSでは、光学式のロータリエンコーダを用いている。
- 光学式ロータリエンコーダの概要
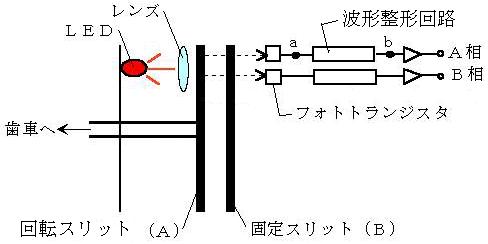
fig.1 光学式ロータリエンコーダの概要
fig.1に光学式ロータリエンコーダの概略図を示す。 発光ダイオード(LED)と受光素子(フォトトランジスタ)が、回転軸に取り付けられた回転スリット(A)と固定スリット(B)をはさみ相対して取り付けられている。 回転スリット(A)が回転すると、ダイオードの光がスリットにって通過、遮断を繰り返す。 この光を受光素子により検出して、信号(パルス)に変換する。 出力信号を2相にするため、固定スリット(B)のスリットは2つで、90°位相がずれている。
ロータリーエンコーダからの出力信号は近似正弦波形であるので、これを波形整形回路でパルス波形にする。 fig.2にその波形の変化を示す。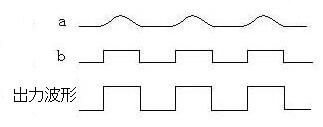
fig.2 波形の変化図
- 回転量の検出
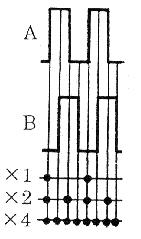
fig.3 検出方法
パルスのカウント法は、上図のよう に1,2,4逓倍の数え方がある。 MIRSではA相、B相が0のときにどちらが立ち上るかを判別している1逓倍を使っている。MIRS標準のマイクロエンコーダでは1回転するのに100パルス発生する。 また、ギヤで回転を1/16に落としているので回転数を求める場合は、以下の式で求められる。(タイヤの回転数)=(ロータリエンコーダカウント値)/1600
- 回転方向(正転/逆転)の判別
パルス整形回路からの出力信号A,Bの組み合わせには、回転方向により2つのパターンがある。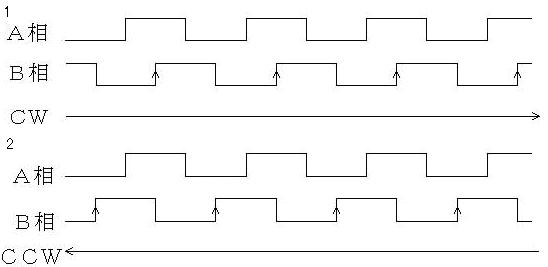
fig.4 回転方向の判別方法
上記のように出力信号A,Bの位相差は常に90°であるが、回転方向により、ずれ方が異なってくる。
1の場合、B信号の立ち上がり時にA信号は必ず"H"になっているときと2の場合のようなB信号の立ち上がり時にA信号は"L"になっている場合の二つによって回転方向が判別できる。
- 回転速度の検出 A、Bの周波数は回転数に比例するからBのパルスを一定時間毎にカウントし回転数をデータ化する。 データの読み込みはタイマー割り込みを使い、そのたびにカウンタはリセットされる
fig.5 パルス弁別回路
- 機能概要
MIRSATLM FPGAボード モジュールはモータの回転数をカウントし、移動した距離の計測や自己位置を認識する行うためのものであり、FPGAボード内のFPGAチップに構成される。
この機能を実現するためにMIRSATLM FPGAボード モジュールでは以下のような機能構成を持つ。
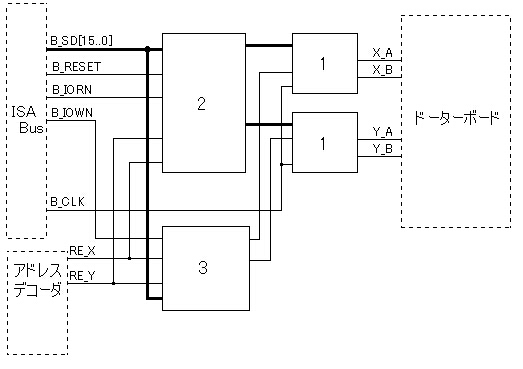
fig.6 FPGAボード モジュールの機能構成図- カウント回路
モータからの信号からモータの回転数をカウントする回路。 - カウント制御回路
データ呼出し命令がきた時にをISAバスにカウントデータを送る機能を持つ回路。 - リセット制御回路
リセット命令がきた時に実際にカウンタをリセットさせる信号を制御する回路 。
- カウント回路
- 機能詳細
ロータリエンコーダモジュールでは、自己位置認識のためのモータの回転数をカウントする。
モータのロータリエンコーダ部からA相、B相の90度ずれた矩形波が発生する。
それをカウントすることによってモータの回転数を調べる。
以下では、機能構成図fig.5に示した各機能ブロックの詳細説明を行う。
- カウント回路
モータのロータリエンコーダ部からの信号から回転数を実際にカウントする回路。 回転方向は、90度ずれた矩形波の変化する順番によって見分ける。(回転方向の判別)
カウントの方法には、fig.3に示すように1、2、4逓倍のカウントの方法があるがこの回路では1逓倍でカウントする。 また、負の数は補数表示となる。 カウンタは16bitカウンタである。 - カウント制御回路
この回路は、アドレスが指定されかつ、読み取り命令がきたときバスにアドレスで指定されたカウンタの値を出力する働きを持つ。 それ以外の場合は、ハイインピーダンスを出力しておく。 - リセット制御回路
この回路はアドレスが指定され、リセット命令がバスから書きこまれるとアドレスで指定されたカウンタがリセットされる。
- カウント回路
- インターフェース
table 5 ロータリエンコーダモジュールのインターフェース 信号名 方 向 対 象 概 要 RE_X IN アドレスデコーダ モジュールセレクタ信号(Xカウンタ選択用) RE_Y IN アドレスデコーダ モジュールセレクタ信号(Yカウンタ選択用) SD 0 to 15 INOUT ISA-Bus 16bit データバス IOR IN ISA-Bus I/Oリード・ストローブ IOW IN ISA-Bus I/Oライト・ストローブ RESET IN ISA-Bus システム・リセット CLK IN ISA-Bus システム・クロック 8MHz デューティ50% X_A,X_B IN ドーターボード Xカウンタ用2相信号入力端子 Y_A,Y_B IN ドーターボード Yカウンタ用2相信号入力端子
- <
マイクロエンコーダ
MIRSでのマイクロエンコーダは、maxonのモータと一体化したものです。 詳しくはモータ技術資料参照。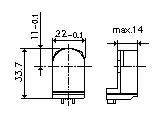
供給電圧 5V(-10/+10%) 出力信号 TTLコンパチブル 立ち上がり時間 200ns 下降時間 50ns チャンネル数 2 カウント/回転 100 使用温度範囲 -20/+85℃ コード・ホイール慣性モーメント =<0.05gcm2 最大加速度 250000rads-2 最大出力電流/チャンネル 5maA 位相差 90°e(-45/+45°e) 最大周波数 20kHz