| 沼津高専 電子制御工学科 | ||||||
| ||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2000.11.17 | 全員 | 金武 | 初版 | ||
| A02 | 2001.2.9 | 金武 | 金武 | センサの数、外観図を変更 | ||
MIRS0005では「最初にポストの位置を調べておいて、後から一気に獲得しに行く」という行動をとることにする。
○1回目の競技(行動)
○2回目の競技(行動)
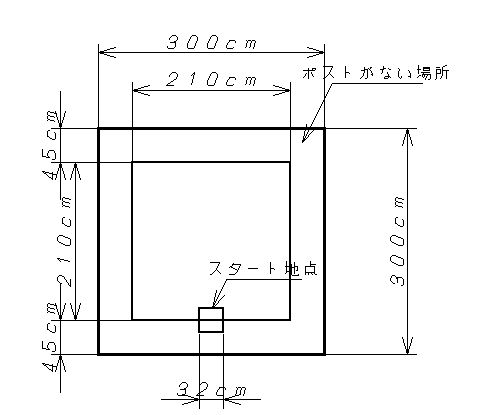
<競技場の寸法>
|
探索モードB
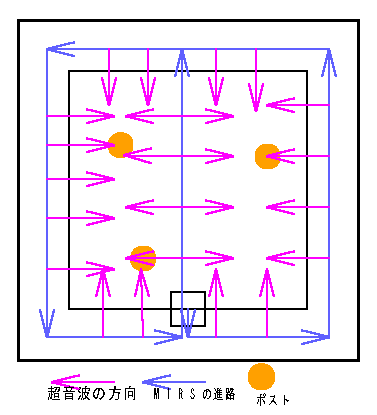
丁度1周してスタート地点に戻ってきたら、前のセンサで150cmのところで左に90度回転。 フィールドの真中を進む。 このとき左右のセンサでポストの位置を確認、前のセンサで10cmのところまで進み、180度回転して探索モードは終了。 このとき進路上にポストがある可能性があるが、超音波センサで 感知して、よける。(図) 結局ポストが縦又は横に重なっていない限り、 4回超音波で測定することになる。 縦(又は横)に二つ重なっていた場合でも3回は確認できる。 これを元に獲得モードへのポストへの経路の計算をする。 | 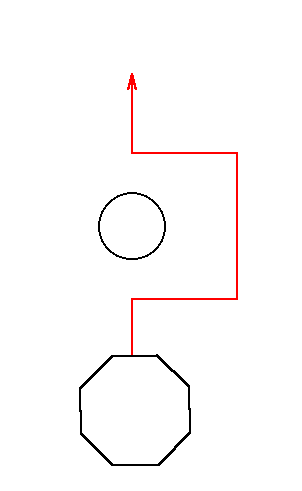 |
経路の計算
探索モードで得たデータに基づき、ポストの位置をおおまかな位置で計算する。
超音波センサによって、(壁への距離-測定データ)で(x,y)座標でポストの位置を算出し、
その座標は二回目の競技にも使うため、保存しておく。
このときMIRSは(x,y)=(150,300)の位置にいるはずである。反時計周りに近いものから
獲得することにする。
このときにポストの個数分の経路を計算する。
| 獲得モードA
経路の計算で得た経路に基づき進んでいく。横方向(x)、縦方向(y)の順に、 直角に進んでいく。 ポストを超音波センサで確認する。ポストにMIRSを当ててタッチセンサの反応をみる。 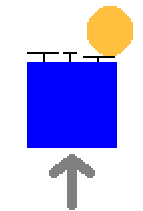 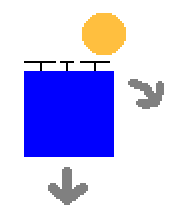 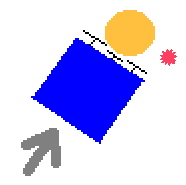 右肩のタッチセンサが反応したら後退→右に少し回転 左肩のタッチセンサが反応したら後退→左に少し回転 真中のタッチセンサが反応したら後退→右に90度回転 獲得モードBへ。 | 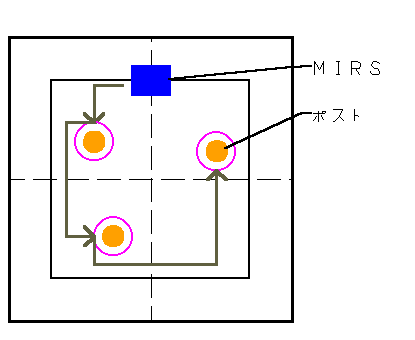 |
| 獲得モードB 反時計周りに回りながら左の赤外線センサで赤外線を受信する。 赤外線を受信したら、左に90度回り、前の赤外線センサで赤外線を受信する。 MIRSを前進させてポストを獲得する。赤外線が消えたら、1周回ってもとの位置に戻り獲得モードAへ。 |  |
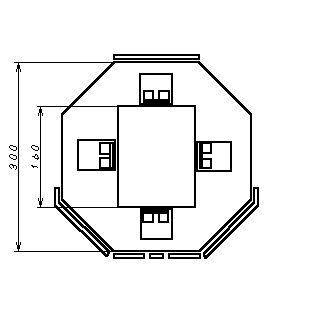
<特徴>
<各種センサについて>
| 関連文書 |
|---|