本ドキュメントは、MIRS0004基本設計書(MIRS0004-DSGN-0003)に規定された システムの動作規定、状態遷移を実現する各タスクの開発(コーディング、試験等)に必 要な事項を述べる。
MIRS0004 ソフトウェアは、RT-Linux 上で動作するプログラム群で構成される。 プログラムは、Linux の標準の API とともに、行動モードに対応したプログラム、一つの機能を複数のプログラム群で提供する機能モジュール、および、RTタスク、ドライバと、補助関数と独自に定義したヘッダファイルから構成される。
本 MIRS0004 では、行動モードに対応した次の6個のモードモジュールを用意する。 IO 制御は、超音波測定と駆動系の制御を RT タスクとして駆動させ、 赤外線センサ信号入力探知と、LCD 出力は、デバイスドライバを用いて行う。 デバイスドライバは、標準 API のデバイスドライバを利用する。
主な内容は、本MIRS0004のMIRS0004-TECH-0008に記載する。
本OSRTLINUXは標準のLINUX環境でのプログラムの開発ができ、フラッシュメモリ上に収めることができ、MIRSの開発に極めて適しているOSといえる。
0. メインモード
- モード定義
すべてのモードの制御を行うモード - モード遷移条件
なし。
- 回避モード
- モード定義
最初後ろに下がり壁に向かって移動するモード。
- モード遷移条件
初期状態→回避モード→ポスト探索モード
- モード定義
- 獲得トレースモード
- モード定義
ポストの獲得をトレースするモード - モード遷移条件
ポスト探索モード→ポストが発見された場合→獲得トレースモード
- モード定義
- ポスト探索モード
- モード定義
ポストの位置を探索するモード - モード遷移条件
回避モード→ポストの発見→自己位置修正モード
ポスト探索→向かいの壁まで到着→自己位置修正モード
- モード定義
- 自己位置修正モード
- モード定義
ポストを獲得した後に元の直進していた位置まで戻るモード - モード遷移条件
ポストの獲得終了→自己位置修正→ポスト探索モード
- モード定義
以下にMIRS0004で用いる。モードモジュール・RTタスクモジュール・デバイスド ライバ・機能モジュール・関数モジュール・ヘッダファイルの関係を示す。
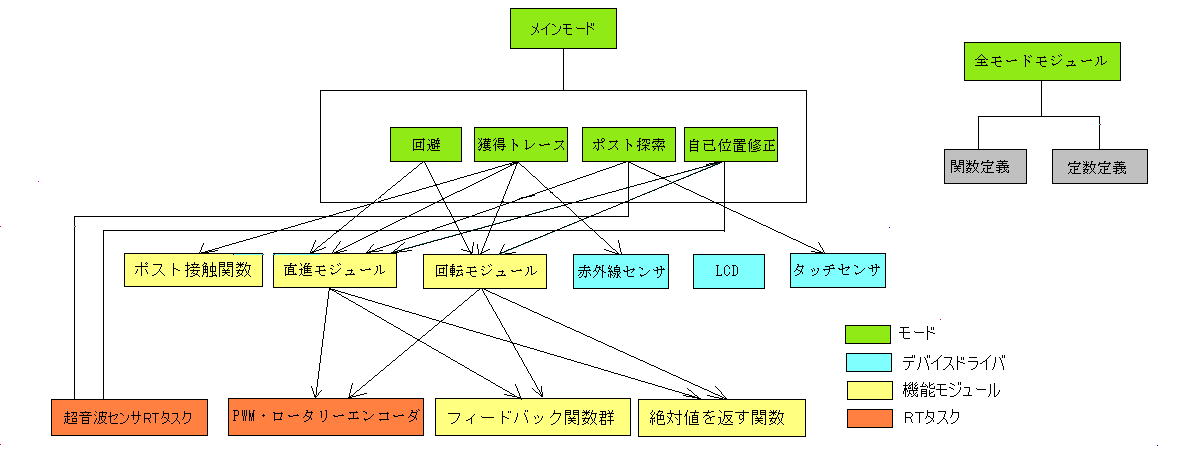
- モードモジュール
0. メインモード- モード定義
すべてのモードの制御を行うモード - モード遷移条件
なし - 構成要素
機能モジュール 全て 補助関数 全て RT タスク 全て デバイスドライバ 全て - 関数名
int main(int argc,char *argv[]); - 引数
main関数の引数 - 戻り値
0(正常終了) - アルゴリズム(フローチャート)
なし
- モード定義
- 回避モード
- モード定義
競技開始時に後ろに下がり壁に接触するためのモード - モード遷移条件
実行開始→ポスト探索モード - 構成要素
機能モジュール、補助関数、RT タスク、デバイスドライバ機能モジュール 直進モジュール、回転モジュール 補助関数 PWM・ロータリーコーダエンコ-ダ
デューティー比のデコードRT タスク 超音波センサ RTタスクモジュール
PWM・ロータリーエンコーダ RTタスクモジュールデバイスドライバ なし - 関数名
void avoid(int argc,char* argv[]); - 引数
メイン関数の引数 - 戻り値
無し。 - アルゴリズム(フローチャート)

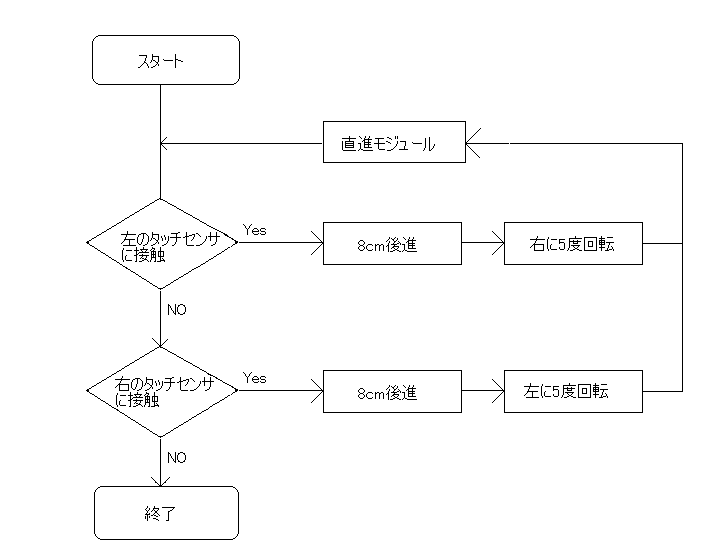
- モード定義
- ポスト探索モード
- モード定義
ポストの位置を探索するモード - モード遷移条件
回避モード→ポストの発見→自己位置修正モード
ポスト探索→向かいの壁まで到着→自己位置修正 - 構成要素
機能モジュール、補助関数、RT タスク、デバイスドライバ機能モジュール 直進モジュール 補助関数 PWM・ロータリーコーダエンコ-ダ
デューティー比のデコードRT タスク 超音波センサ RTタスクモジュール
PWM・ロータリーエンコーダ RTタスクモジュールデバイスドライバ タッチセンサドライバ - 関数名
void search();
- 引数
発見したかどうかもしくは壁と接触したかを入力。 - 戻り値
なし - アルゴリズム(フローチャート)
- モード定義
- 獲得トレースモード
- モード定義
ポストの獲得をトレースするモード - モード遷移条件
自己位置修正→獲得トレースモード - 構成要素
機能モジュール、補助関数、RT タスク、デバイスドライバ機能モジュール 直進モジュール・回転モジュール 補助関数 PWM・ロータリーコーダエンコ-ダ
デューティー比のデコード・回転角のエンコードRT タスク RTタスクモジュール
PWM・ロータリーエンコーダ RTタスクモジュールデバイスドライバ タッチセンサ、赤外線センサ - 関数名
void irs_mode(); - 引数
なし。 - 戻り値
ポストを発見して押したかどうか。 - アルゴリズム(フローチャート)
- モード定義
- 自己位置修正モード
- モード定義
かべ、ポストなどと接触したときに90度に補正するモード - モード遷移条件
ポスト探索モード→自己位置修正
壁に接触→自己位置修正
- 構成要素
機能モジュール、補助関数、RT タスク、デバイスドライバ機能モジュール 直進モジュール・回転モジュール 補助関数 PWM・ロータリーコーダエンコ-ダ
デューティー比のデコード・回転角のエンコードRT タスク 超音波センサ RTタスクモジュール
PWM・ロータリーエンコーダ RTタスクモジュールデバイスドライバ タッチセンサドライバ - 関数名
double manage(); - 引数
なし。 - 戻り値
double radius;
補正した角度 - アルゴリズム(フローチャート)
- モード定義
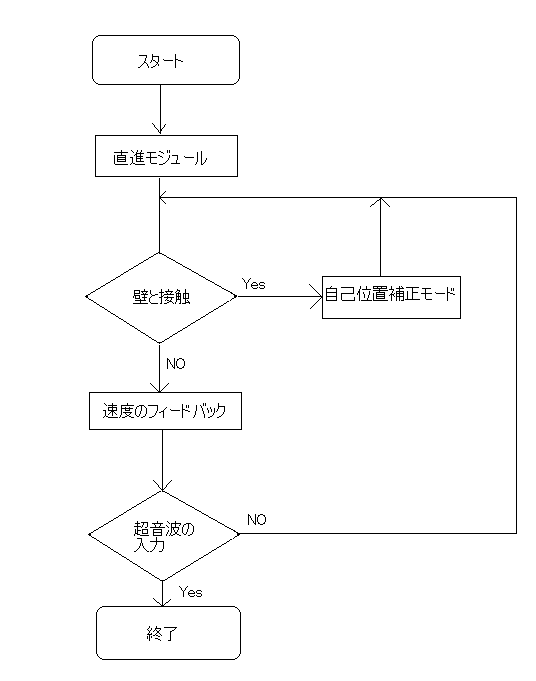
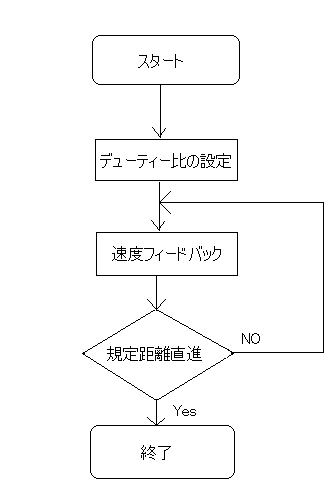
- 直進モジュール
- 機能
モーターを回転させて直進させるモジュール。 - 構成要素
補助関数、RT タスク、デバイスドライバ
PWM・ロータリーエンコーダRT-タスクモジュール - このモジュールが使用されるモード
回避モード、獲得トレースモード、補助探索モード、ポスト探索モード、自己位置修正モード - 関数名
void straight(double left,double right,int leng);
第一引数:左の速度
第二引数:右の速度
第三引数:直進距離
- 引数
double left;
double right;
int leng;
- 戻り値
なし - アルゴリズム(フローチャート)
- 機能
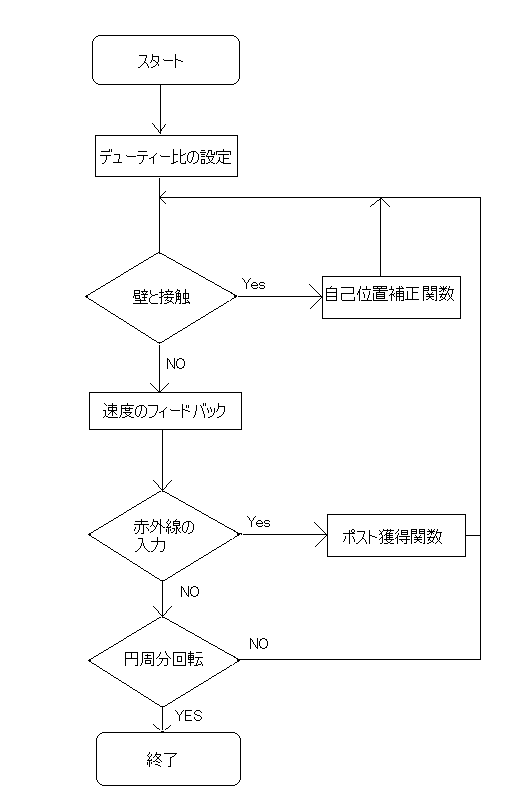
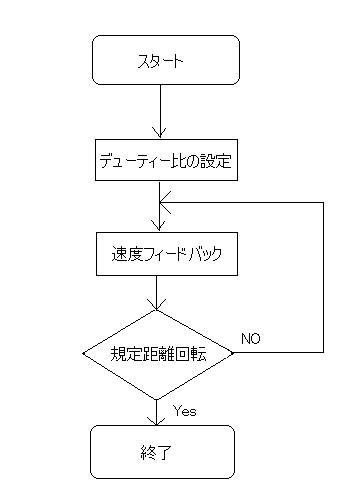
- 回転モジュール
- 機能
自機を回転させて向かう方向を変えるモジュール - 構成要素
補助関数、RT タスク、デバイスドライバ
PWM・ロータリーエンコーダRT-タスクモジュール - このモジュールが使用されるモード
回避モード、補助探索モード、ポスト探索モード 、獲得トレースモード 、自己位置修正モード - 関数名
void rotation(double radius); - 引数
double radius;(回転角) - 戻り値
なし。 - アルゴリズム(フローチャート)
- 機能
- 超音波センサ RTタスクモジュール
-
標準MIRSで提供されている物を使用する。MIRSATML 超音波センサRTタスクモジュール取扱説明書(MIRSATML-SOFT-1001)
- 機能
- このRTタスクモジュールがされるモード、機能モジュール
- 構成要素 関数モジュール
- 関数名
- 優先度
- FIFO の仕様
- アルゴリズム
- PWM・ロータリーエンコーダ RTタスクモジュール
-
標準MIRSで提供されている物を使用する。MIRSATML PWM・ロータリーエンコーダRTタスクモジュール取扱説明書(MIRSATML-SOFT-1002)
- 機能
- このRTタスクモジュールがされるモード、機能モジュール
- 構成要素 関数モジュール
- 関数名
- 優先度
- FIFO の仕様
- アルゴリズム
- 赤外線センサドライバ
- 標準MIRSで提供されている物を使用する。MIRSATML 赤外線・タッチセンサデバイスドライバ取扱説明書(MIRSATML-SOFT-1004)
- 機能
- このドライバ使用されるモード、モジュール
- 関数名
- IO アドレス、IRQ
- アルゴリズム
- 機能
- LCDドライバ
- 標準MIRSで提供されている物を使用する。MIRSATLM LCDデバイスドライバ取扱説明書(MIRSATML-SOFT-1003)
- 機能
- このドライバ使用されるモード、モジュール
- 関数名
- IO アドレス、IRQ
- アルゴリズム
- 機能
- タッチセンサドライバ
-
標準MIRSで提供されている物を使用する。MIRSATML 赤外線・タッチセンサデバイスドライバ取扱説明書(MIRSATML-SOFT-1004)
- 機能
- このドライバ使用されるモード、モジュール
- 関数名
- IO アドレス、IRQ
- アルゴリズム
- 機能
- フィードバック関数(速度)
- 機能
ディユーティー比の調整を行なう - このモジュールが使用されるモード、モジュール
獲得トレースモード、回転モジュール、直進モジュール - 関数名
void feed_speed(double* left,double *right,int direct); - 引数、戻り値
引数
int *right;右のディユーティー比
int *left;左のディユーティー比
int direct;前か後ろか
戻り値なし
- 機能
- フィードバック関数(距離)
- 機能
ディユーティー比の調整を行なう - このモジュールが使用されるモード、モジュール
獲得トレースモード、回転モジュール、直進モジュール - 関数名
void feed_rot(double* left,double *right,int direct); - 引数、戻り値
引数
int *right;右のディユーティー比
int *left;左のディユーティー比
int direct;前か後ろか
戻り値なし
- 機能
- フィードバック関数(ポストと接触したとき)
- 機能
少し後ろに下がって角度の補正をしてまた、獲得モードに入る - このモジュールが使用されるモード、モジュール
獲得トレースモード、回転モジュール、直進モジュール - 関数名
void feed_post(double left,double right); - 引数、戻り値
引数
int right;右のディユーティー比
int left;左のディユーティー比
戻り値なし
- 機能
- ポストと接触するための関数
- 機能
ポストと接触するため、デューティー比を調整する関数 - このモジュールが使用されるモード、モジュール
獲得トレースモード - 関数名
int post_touch(double* left, double* right); - 引数、戻り値
引数
int *right;右のディユーティー比
int *left;左のディユーティー比
戻り値なし
- 機能
- 絶対値を返す関数
- 機能
引数の絶対値を返す - このモジュールが使用されるモード、モジュール
獲得トレースモード、回転モジュール、直進モジュール - 関数名
double myabs(double); - 引数、戻り値
引数:値
戻り値:絶対値
- 機能
- 関数定義ヘッダ
- 機能
使う関数の名前の定義を行う - このヘッダファイルを利用するモード、機能モジュール、ドライバ、RTタスクなど
回避モード ,獲得トレースモード ,補助探索モード ,ポスト探索モード ,自己位置修正モード ,直進モジュール ,回転モジュール ,超音波センサ RTタスクモジュール ,PWM・ロータリーエンコーダ RTタスクモジュール ,赤外線センサドライバ PWM・ロータリーエンコーダ RTタスクモジュール ,タッチセンサドライバ - ヘッダ名・定義する関数
ヘッダファイル名 avoid.h 定義関数 void straight(double,double,int); void rotation(double); void feed_back(double,double); int rot_poll(int,double); void call_encoder_data(); void encoder_print(); int post_touch(double* , double*); void feed_post(double left,double right); void feed_rot(double* ,double *,int); void feed_speed(double* ,double *,int); double myabs(double);
ヘッダファイル名 irs_mode.h 定義関数 extern int irs_mode();
ヘッダファイル名 manage.h 定義関数 double manage();
ヘッダファイル名 search.h 定義関数 extern void search();
ヘッダファイル名 senser.h 定義関数 extern int uss[5]; extern char irs[7]; extern char ts[7];
- 機能
- 定数・型定義ヘッダ
- 機能
使う定数・型の名前の定義を行う - このヘッダファイルを利用するモード、機能モジュール、ドライバ、RTタスクなど
回避モード ,獲得トレースモード ,補助探索モード ,ポスト探索モード ,自己位置修正モード ,直進モジュール ,回転モジュール ,超音波センサ RTタスクモジュール ,PWM・ロータリーエンコーダ RTタスクモジュール ,赤外線センサドライバ PWM・ロータリーエンコーダ RTタスクモジュール ,タッチセンサドライバ - ヘッダ名 myfuncs.h
- 定義する変数
#define RIGHT 23.
#define LEFT -23.
- 機能