杮僪僉儏儊儞僩偼丄MIRS0004婎杮愝寁彂(MIRS0004-DSGN-0003)偵婯掕偝傟偨 僔僗僥儉偺摦嶌婯掕丄忬懺慗堏傪幚尰偡傞奺僞僗僋偺奐敪乮僐乕僨傿儞僌丄帋尡摍乯偵昁 梫側帠崁傪弎傋傞丅
MIRS0004 僜僼僩僂僃傾偼丄RT-Linux 忋偱摦嶌偡傞僾儘僌儔儉孮偱峔惉偝傟傞丅 僾儘僌儔儉偼丄Linux 偺昗弨偺 API 偲偲傕偵丄峴摦儌乕僪偵懳墳偟偨僾儘僌儔儉丄堦偮偺婡擻傪暋悢偺僾儘僌儔儉孮偱採嫙偡傞婡擻儌僕儏乕儖丄偍傛傃丄RT僞僗僋丄僪儔僀僶偲丄曗彆娭悢偲撈帺偵掕媊偟偨僿僢僟僼傽僀儖偐傜峔惉偝傟傞丅
杮 MIRS0004 偱偼丄峴摦儌乕僪偵懳墳偟偨師偺6屄偺儌乕僪儌僕儏乕儖傪梡堄偡傞丅 IO 惂屼偼丄挻壒攇應掕偲嬱摦宯偺惂屼傪 RT 僞僗僋偲偟偰嬱摦偝偣丄 愒奜慄僙儞僒怣崋擖椡扵抦偲丄LCD 弌椡偼丄僨僶僀僗僪儔僀僶傪梡偄偰峴偆丅 僨僶僀僗僪儔僀僶偼丄昗弨 API 偺僨僶僀僗僪儔僀僶傪棙梡偡傞丅
庡側撪梕偼丄杮MIRS0004偺MIRS0004-TECH-0008偵婰嵹偡傞丅
杮OSRTLINUX偼昗弨偺LINUX娐嫬偱偺僾儘僌儔儉偺奐敪偑偱偒丄僼儔僢僔儏儊儌儕忋偵廂傔傞偙偲偑偱偒丄MIRS偺奐敪偵嬌傔偰揔偟偰偄傞OS偲偄偊傞丅
丂 0.丂儊僀儞儌乕僪
- 儌乕僪掕媊
偡傋偰偺儌乕僪偺惂屼傪峴偆儌乕僪 - 儌乕僪慗堏忦審
側偟丅
- 夞旔儌乕僪
- 儌乕僪掕媊
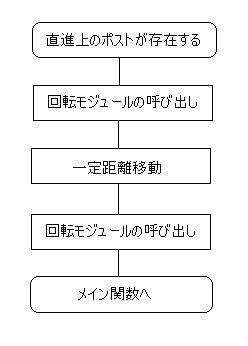
僗僞乕僩帪偵MIRS偺恑傓捈慄忋偵億僗僩偑偁偭偨応崌偵峴傢傟傞儌乕僪(夞旔棟桼偼峴摦寁夋彂偵婰偡) - 儌乕僪慗堏忦審
弶婜忬懺仺億僗僩偑宱楬偵偁傞応崌仺億僗僩扵嶕儌乕僪
- 儌乕僪掕媊
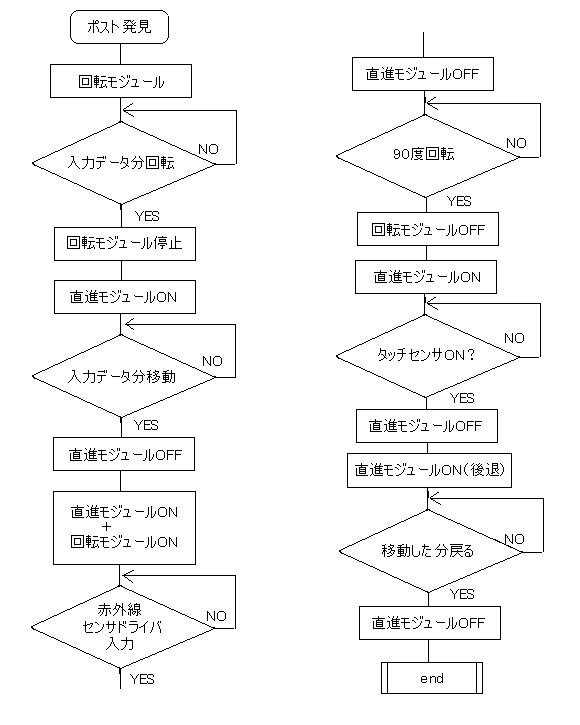
- 妉摼僩儗乕僗儌乕僪
- 儌乕僪掕媊
億僗僩偺妉摼傪僩儗乕僗偡傞儌乕僪 - 儌乕僪慗堏忦審
億僗僩扵嶕儌乕僪仺億僗僩偑敪尒偝傟偨応崌仺妉摼僩儗乕僗儌乕僪
- 儌乕僪掕媊
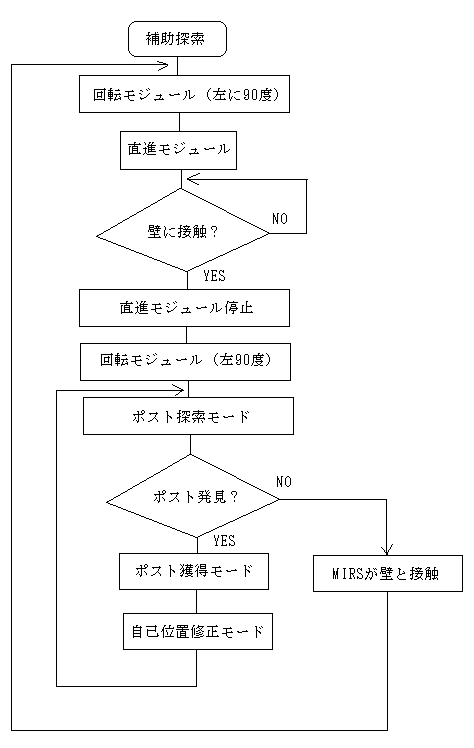
- 曗彆扵嶕儌乕僪
- 儌乕僪掕媊
捈恑偟偰斀懳偺暻傑偱峴偒偮偄偨屻偵幚峴偡傞儌乕僪 - 儌乕僪慗堏忦審
岦偐偄偺暻傑偱摓拝仺曗彆扵嶕儌乕僪仺妉摼僩儗乕僗儌乕僪乮億僗僩敪尒帪乯
- 儌乕僪掕媊
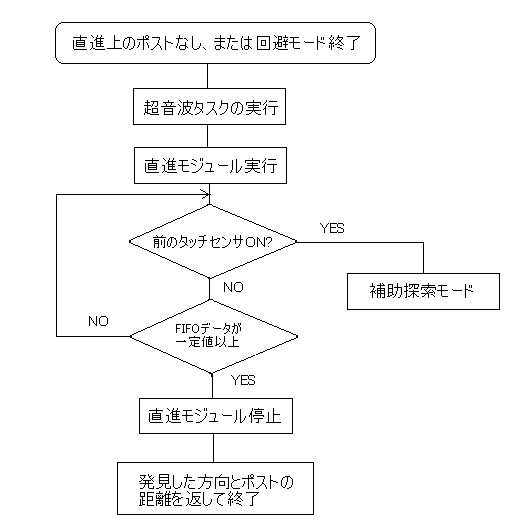
- 億僗僩扵嶕儌乕僪
- 儌乕僪掕媊
億僗僩偺埵抲傪扵嶕偡傞儌乕僪 - 儌乕僪慗堏忦審
夞旔儌乕僪仺億僗僩偺敪尒仺妉摼僩儗乕僗儌乕僪
億僗僩扵嶕仺岦偐偄偺暻傑偱摓拝仺曗彆扵嶕
- 儌乕僪掕媊
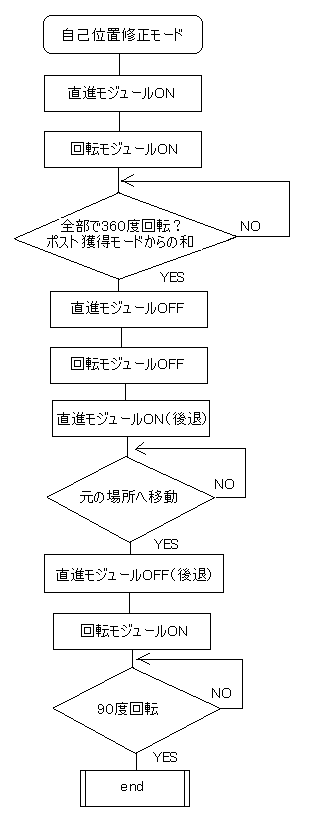
- 帺屓埵抲廋惓儌乕僪
- 儌乕僪掕媊
億僗僩傪妉摼偟偨屻偵尦偺捈恑偟偰偄偨埵抲傑偱栠傞儌乕僪 - 儌乕僪慗堏忦審
億僗僩偺妉摼廔椆仺帺屓埵抲廋惓仺億僗僩扵嶕儌乕僪
- 儌乕僪掕媊
埲壓偵MIRS0004偱梡偄傞丅儌乕僪儌僕儏乕儖丒RT僞僗僋儌僕儏乕儖丒僨僶僀僗僪 儔僀僶丒婡擻儌僕儏乕儖丒娭悢儌僕儏乕儖丒僿僢僟僼傽僀儖偺娭學傪帵偡丅
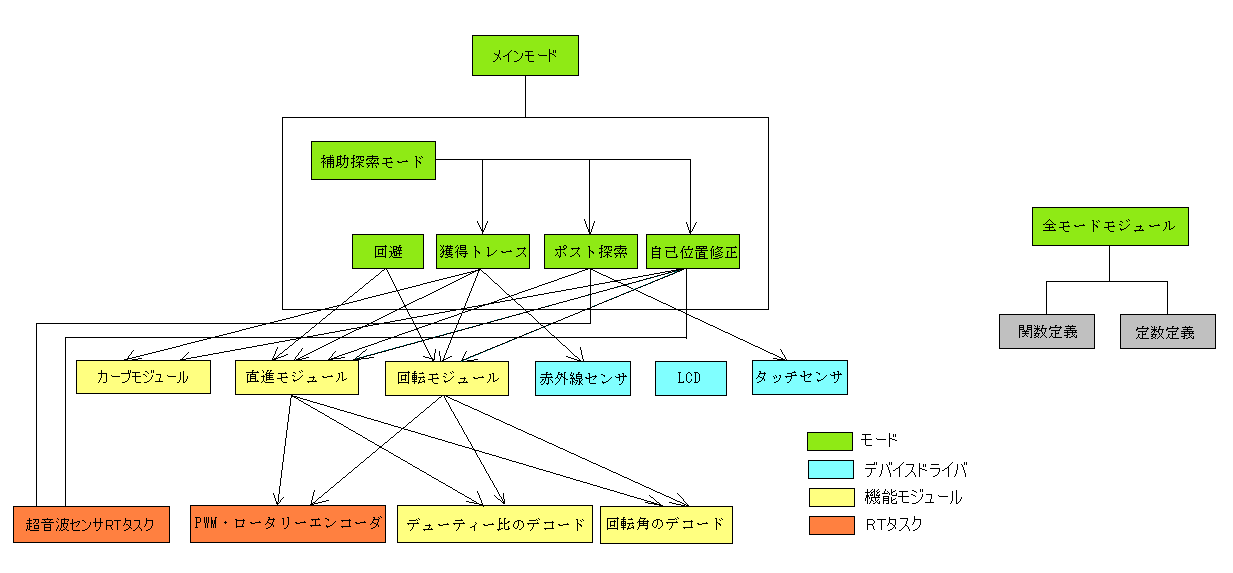
- 儌乕僪儌僕儏乕儖
丂 0.丂儊僀儞儌乕僪- 儌乕僪掕媊
偡傋偰偺儌乕僪偺惂屼傪峴偆儌乕僪 - 儌乕僪慗堏忦審
側偟 - 峔惉梫慺
婡擻儌僕儏乕儖 慡偰 曗彆娭悢 慡偰 RT 僞僗僋 慡偰 僨僶僀僗僪儔僀僶 慡偰 - 娭悢柤
int main(int argc,char *argv[]); - 堷悢
main娭悢偺堷悢 - 栠傝抣
0乮惓忢廔椆乯 - 傾儖僑儕僘儉乮僼儘乕僠儍乕僩乯
側偟
- 儌乕僪掕媊
- 夞旔儌乕僪
- 儌乕僪掕媊
僗僞乕僩帪偵MIRS偺恑傓捈慄忋偵億僗僩偑偁偭偨応崌偵峴傢傟傞儌乕僪(夞旔棟桼偼峴摦寁夋彂偵婰偡) - 儌乕僪慗堏忦審
弶婜忬懺仺億僗僩偑宱楬偵偁傞応崌仺億僗僩扵嶕儌乕僪 - 峔惉梫慺
婡擻儌僕儏乕儖丄曗彆娭悢丄RT 僞僗僋丄僨僶僀僗僪儔僀僶婡擻儌僕儏乕儖 捈恑儌僕儏乕儖丄夞揮儌僕儏乕儖 曗彆娭悢 PWM丒儘乕僞儕乕僐乕僟僄儞僐亅僟
僨儏乕僥傿乕斾偺僨僐乕僪RT 僞僗僋 挻壒攇僙儞僒 RT僞僗僋儌僕儏乕儖
PWM丒儘乕僞儕乕僄儞僐乕僟 RT僞僗僋儌僕儏乕儖僨僶僀僗僪儔僀僶 側偟 - 娭悢柤
StructEvode ModeEvode();typedef struct POINT{ int radius; double rage; }POINT; typedef struct{ int flag; POINT pt; }StructEvode;夞旔儌乕僪幚峴帪偵塃偵偢傟偨偐嵍偵偢傟偨偐丄偳傟偩偗偢傟偨偐傪擖椡丅 - 堷悢
側偟 - 栠傝抣
StructEvode Srevo; - 傾儖僑儕僘儉乮僼儘乕僠儍乕僩乯
- 儌乕僪掕媊
- 曗彆扵嶕儌乕僪
- 儌乕僪掕媊
捈恑偟偰斀懳偺暻傑偱峴偒偮偄偨屻偵幚峴偡傞儌乕僪 - 儌乕僪慗堏忦審
岦偐偄偺暻傑偱摓拝仺曗彆扵嶕儌乕僪仺妉摼僩儗乕僗儌乕僪乮億僗僩敪尒帪乯 - 峔惉梫慺
婡擻儌僕儏乕儖 捈恑儌僕儏乕儖丄夞揮儌僕儏乕儖 曗彆娭悢 PWM丒儘乕僞儕乕僐乕僟僄儞僐亅僟
僨儏乕僥傿乕斾偺僨僐乕僪
夞揮妏偺僄儞僐乕僪RT 僞僗僋 挻壒攇僙儞僒 RT僞僗僋儌僕儏乕儖
PWM丒儘乕僞儕乕僄儞僐乕僟 RT僞僗僋儌僕儏乕儖僨僶僀僗僪儔僀僶 愒奜慄僙儞僒僪儔僀僶丒僞僢僠僙儞僒僪儔僀僶 - 娭悢柤
void support(POSTDATA dat[]); - 堷悢
偲偭偨億僗僩偡傋偰偺僨乕僞傪搉偡丅typedef struct { int postnum; int x; int y; }POSTDATA; postnum偼億僗僩偺庢傞弴斣丅 x偼億僗僩偺x嵗昗 y偼億僗僩偺y嵗昗 - 栠傝抣 側偟
- 傾儖僑儕僘儉乮僼儘乕僠儍乕僩乯
- 儌乕僪掕媊
- 億僗僩扵嶕儌乕僪
- 儌乕僪掕媊
億僗僩偺埵抲傪扵嶕偡傞儌乕僪 - 儌乕僪慗堏忦審
夞旔儌乕僪仺億僗僩偺敪尒仺妉摼僩儗乕僗儌乕僪
億僗僩扵嶕仺岦偐偄偺暻傑偱摓拝仺曗彆扵嶕 - 峔惉梫慺
婡擻儌僕儏乕儖丄曗彆娭悢丄RT 僞僗僋丄僨僶僀僗僪儔僀僶婡擻儌僕儏乕儖 捈恑儌僕儏乕儖 曗彆娭悢 PWM丒儘乕僞儕乕僐乕僟僄儞僐亅僟
僨儏乕僥傿乕斾偺僨僐乕僪RT 僞僗僋 挻壒攇僙儞僒 RT僞僗僋儌僕儏乕儖
PWM丒儘乕僞儕乕僄儞僐乕僟 RT僞僗僋儌僕儏乕儖僨僶僀僗僪儔僀僶 僞僢僠僙儞僒僪儔僀僶丒愒奜慄僪儔僀僶 - 娭悢柤
void SearchPillars(Discover* discover);
- 堷悢
typedef struct{ int Length; int flag; }Discover;敪尒偟偨偐偳偆偐偲億僗僩傑偱偺嫍棧傪擖椡丅 - 栠傝抣
側偟 - 傾儖僑儕僘儉乮僼儘乕僠儍乕僩乯
- 儌乕僪掕媊
- 妉摼僩儗乕僗儌乕僪
- 儌乕僪掕媊
億僗僩偺妉摼傪僩儗乕僗偡傞儌乕僪 - 儌乕僪慗堏忦審
億僗僩扵嶕儌乕僪仺億僗僩偑敪尒偝傟偨応崌仺妉摼僩儗乕僗儌乕僪 - 峔惉梫慺
婡擻儌僕儏乕儖丄曗彆娭悢丄RT 僞僗僋丄僨僶僀僗僪儔僀僶婡擻儌僕儏乕儖 捈恑儌僕儏乕儖丒夞揮儌僕儏乕儖 曗彆娭悢 PWM丒儘乕僞儕乕僐乕僟僄儞僐亅僟
僨儏乕僥傿乕斾偺僨僐乕僪丒夞揮妏偺僄儞僐乕僪RT 僞僗僋 挻壒攇僙儞僒 RT僞僗僋儌僕儏乕儖
PWM丒儘乕僞儕乕僄儞僐乕僟 RT僞僗僋儌僕儏乕儖僨僶僀僗僪儔僀僶 側偟 - 娭悢柤
丂void GetPillar(Discover* discover,GetPillarMove* MoPillar); - 堷悢
Discover峔憿懱偼億僗僩扵嶕儌乕僪帪偵擖椡偟偨嫍棧傪嶲徠偡傞偨傔丅typedef struct { int Lenght; double rage; int radius; }GetPillarMove;妉摼偲儗乕僗儌乕僪偺幚峴帪偵堏摦偟偨嫍棧丄夞偭偨敿宎丄夞偭偨妏搙傪擖椡丅 - 栠傝抣
側偟 - 傾儖僑儕僘儉乮僼儘乕僠儍乕僩乯
- 儌乕僪掕媊
- 帺屓埵抲廋惓儌乕僪
- 儌乕僪掕媊
億僗僩傪妉摼偟偨屻偵尦偺捈恑偟偰偄偨埵抲傑偱栠傞儌乕僪 - 儌乕僪慗堏忦審
億僗僩偺妉摼廔椆仺帺屓埵抲廋惓仺億僗僩扵嶕儌乕僪 - 峔惉梫慺
婡擻儌僕儏乕儖丄曗彆娭悢丄RT 僞僗僋丄僨僶僀僗僪儔僀僶婡擻儌僕儏乕儖 捈恑儌僕儏乕儖丒夞揮儌僕儏乕儖 曗彆娭悢 PWM丒儘乕僞儕乕僐乕僟僄儞僐亅僟
僨儏乕僥傿乕斾偺僨僐乕僪丒夞揮妏偺僄儞僐乕僪RT 僞僗僋 挻壒攇僙儞僒 RT僞僗僋儌僕儏乕儖
PWM丒儘乕僞儕乕僄儞僐乕僟 RT僞僗僋儌僕儏乕儖僨僶僀僗僪儔僀僶 側偟 - 娭悢柤
丂int ReviLocation(GetPillarMove MovePt); - 堷悢
GetPillarMove MovePt;
- 栠傝抣
return END_REVI; (#define END_REVI (1));
惓忢偵廔傢偭偨偐曬崘 - 傾儖僑儕僘儉乮僼儘乕僠儍乕僩乯
- 儌乕僪掕媊
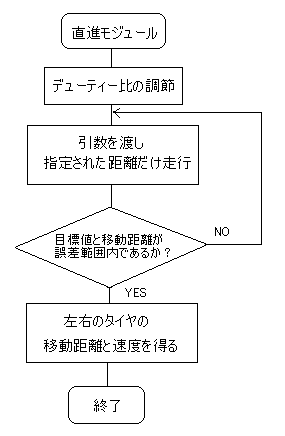
- 捈恑儌僕儏乕儖
- 婡擻
儌乕僞乕傪夞揮偝偣偰捈恑偝偣傞儌僕儏乕儖丅 - 峔惉梫慺
曗彆娭悢丄RT 僞僗僋丄僨僶僀僗僪儔僀僶
俹倂俵丒儘乕僞儕乕僄儞僐乕僟RT-僞僗僋儌僕儏乕儖 - 偙偺儌僕儏乕儖偑巊梡偝傟傞儌乕僪
夞旔儌乕僪丄妉摼僩儗乕僗儌乕僪丄曗彆扵嶕儌乕僪丄億僗僩扵嶕儌乕僪丄帺屓埵抲廋惓儌乕僪 - 娭悢柤
void GoStraight(int length,int flag,int time_f);
length丗堏摦嫍棧
flag丗慜偐屻傠偐丠
time_f:傕偟偙偺僼儔僌偑棫偭偰偄偨傜妱傝崬傒偑棃傞傑偱捈恑
- 堷悢
int length;
int flag;
int time_f;
- 栠傝抣
側偟 - 傾儖僑儕僘儉乮僼儘乕僠儍乕僩乯
- 婡擻
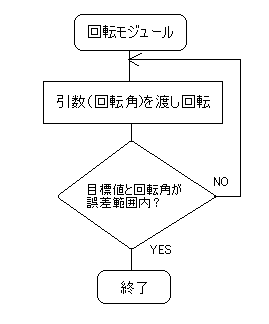
- 夞揮儌僕儏乕儖
- 婡擻
帺婡傪夞揮偝偣偰岦偐偆曽岦傪曄偊傞儌僕儏乕儖 - 峔惉梫慺
曗彆娭悢丄RT 僞僗僋丄僨僶僀僗僪儔僀僶
俹倂俵丒儘乕僞儕乕僄儞僐乕僟RT-僞僗僋儌僕儏乕儖 - 偙偺儌僕儏乕儖偑巊梡偝傟傞儌乕僪
夞旔儌乕僪丄曗彆扵嶕儌乕僪丄億僗僩扵嶕儌乕僪 丄妉摼僩儗乕僗儌乕僪 丄帺屓埵抲廋惓儌乕僪 - 娭悢柤
int Rot_P(double rage); - 堷悢
double rage;(夞揮妏) - 栠傝抣
return 0;(惓忢偵廔椆偟偨偐丠) - 傾儖僑儕僘儉乮僼儘乕僠儍乕僩乯
- 婡擻
- 僇乕僽儌僕儏乕儖
- 婡擻
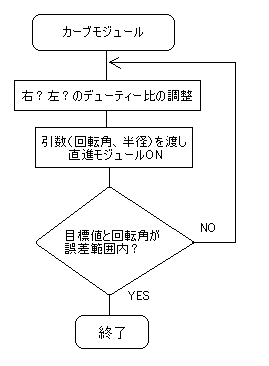
帺婡傪夞揮偝偣偰堏摦偡傞儌僕儏乕儖 - 峔惉梫慺
曗彆娭悢丄RT 僞僗僋丄僨僶僀僗僪儔僀僶
俹倂俵丒儘乕僞儕乕僄儞僐乕僟RT-僞僗僋儌僕儏乕儖 - 偙偺儌僕儏乕儖偑巊梡偝傟傞儌乕僪
曗彆扵嶕儌乕僪妉摼僩儗乕僗儌乕僪 丄帺屓埵抲廋惓儌乕僪 - 娭悢柤
int Rot_M(double rage ,int radius); - 堷悢
double rage;(夞揮妏)
int radius;夞傞敿宎丅(撪懁僞僀儎偑婎弨)
- 栠傝抣
return 0;(惓忢偵廔椆偟偨偐丠) - 傾儖僑儕僘儉乮僼儘乕僠儍乕僩乯
- 婡擻
- 挻壒攇僙儞僒 RT僞僗僋儌僕儏乕儖
-
昗弨MIRS偱採嫙偝傟偰偄傞暔傪巊梡偡傞丅MIRSATML 挻壒攇僙儞僒RT僞僗僋儌僕儏乕儖庢埖愢柧彂(MIRSATML-SOFT-1001)
丂丂丂丂
- 婡擻
- 偙偺RT僞僗僋儌僕儏乕儖偑偝傟傞儌乕僪丄婡擻儌僕儏乕儖
- 峔惉梫慺 娭悢儌僕儏乕儖
- 娭悢柤
- 桪愭搙
- FIFO 偺巇條
- 傾儖僑儕僘儉
- PWM丒儘乕僞儕乕僄儞僐乕僟 RT僞僗僋儌僕儏乕儖
-
昗弨MIRS偱採嫙偝傟偰偄傞暔傪巊梡偡傞丅MIRSATML PWM崄[僞儕乕僄儞僐乕僟RT僞僗僋儌僕儏乕儖庢埖愢柧彂(MIRSATML-SOFT-1002)
- 婡擻
- 偙偺RT僞僗僋儌僕儏乕儖偑偝傟傞儌乕僪丄婡擻儌僕儏乕儖
- 峔惉梫慺 娭悢儌僕儏乕儖
- 娭悢柤
- 桪愭搙
- FIFO 偺巇條
- 傾儖僑儕僘儉
- 愒奜慄僙儞僒僪儔僀僶
- 昗弨MIRS偱採嫙偝傟偰偄傞暔傪巊梡偡傞丅MIRSATML 愒奜慄丒僞僢僠僙儞僒僨僶僀僗僪儔僀僶庢埖愢柧彂(MIRSATML-SOFT-1004)
丂
- 婡擻
- 偙偺僪儔僀僶巊梡偝傟傞儌乕僪丄儌僕儏乕儖
- 娭悢柤
- IO 傾僪儗僗丄IRQ
- 傾儖僑儕僘儉
- 婡擻
- LCD僪儔僀僶
- 昗弨MIRS偱採嫙偝傟偰偄傞暔傪巊梡偡傞丅MIRSATLM LCD僨僶僀僗僪儔僀僶庢埖愢柧彂(MIRSATML-SOFT-1003)
丂
- 婡擻
- 偙偺僪儔僀僶巊梡偝傟傞儌乕僪丄儌僕儏乕儖
- 娭悢柤
- IO 傾僪儗僗丄IRQ
- 傾儖僑儕僘儉
- 婡擻
- 僞僢僠僙儞僒僪儔僀僶
-
昗弨MIRS偱採嫙偝傟偰偄傞暔傪巊梡偡傞丅MIRSATML 愒奜慄丒僞僢僠僙儞僒僨僶僀僗僪儔僀僶庢埖愢柧彂(MIRSATML-SOFT-1004)
丂
- 婡擻
- 偙偺僪儔僀僶巊梡偝傟傞儌乕僪丄儌僕儏乕儖
- 娭悢柤
- IO 傾僪儗僗丄IRQ
- 傾儖僑儕僘儉
- 婡擻
- 僨傿儐乕僥傿乕斾偺僨僐乕僪儌僕儏乕儖
- 婡擻
僨傿儐乕僥傿乕斾偺挷惍傪峴側偆 - 偙偺僪儔僀僶巊梡偝傟傞儌乕僪丄儌僕儏乕儖
妉摼僩儗乕僗儌乕僪丄夞揮儌僕儏乕儖 - 娭悢柤
void decode_duty(int *right,int *left); - 堷悢丄栠傝抣
堷悢
int *right;塃偺僨傿儐乕僥傿乕斾
int *left;嵍偺僨傿儐乕僥傿乕斾
栠傝抣側偟
- 婡擻
- 夞揮妏偺僨僐乕僪儌僕儏乕儖
- 婡擻
夞揮妏偺挷惍傪峴側偆 - 偙偺僪儔僀僶巊梡偝傟傞儌乕僪丄儌僕儏乕儖
妉摼僩儗乕僗儌乕僪丄夞揮儌僕儏乕儖丄帺屓埵抲抣廋惓儌乕僪丄曗彆扵嶕儌乕僪 - 娭悢柤
void decode_duty(double *rage); - 堷悢丄栠傝抣
堷悢丂double *rage;夞揮妏
栠傝抣側偟
- 婡擻
- 愒奜慄偺僨僐乕僪儌僕儏乕儖
- 婡擻
愒奜慄僙儞僒偺僨僐乕僪傪峴偄億僗僩偺懚嵼傪妋擣偡傞丅 - 偙偺僪儔僀僶巊梡偝傟傞儌乕僪丄儌僕儏乕儖
妉摼僩儗乕僗儌乕僪丄夞揮儌僕儏乕儖丄帺屓埵抲抣廋惓儌乕僪丄曗彆扵嶕儌乕僪 - 娭悢柤
int decode_infrared(void); - 堷悢丄栠傝抣
堷悢丂側偟
栠傝抣丂1丂or丂NULL;
1偐NULL偱億僗僩偑偁傞偐側偄偐傪栠傝抣偲偟偰曉偡丅
- 婡擻
- 娭悢掕媊僿僢僟
- 婡擻
丂巊偆娭悢偺柤慜偺掕媊傪峴偆 - 偙偺僿僢僟僼傽僀儖傪棙梡偡傞儌乕僪丄婡擻儌僕儏乕儖丄僪儔僀僶丄RT僞僗僋側偳
夞旔儌乕僪 ,妉摼僩儗乕僗儌乕僪 ,曗彆扵嶕儌乕僪 ,億僗僩扵嶕儌乕僪 ,帺屓埵抲廋惓儌乕僪 ,捈恑儌僕儏乕儖 ,夞揮儌僕儏乕儖 ,挻壒攇僙儞僒 RT僞僗僋儌僕儏乕儖 ,PWM丒儘乕僞儕乕僄儞僐乕僟 RT僞僗僋儌僕儏乕儖 ,愒奜慄僙儞僒僪儔僀僶 PWM丒儘乕僞儕乕僄儞僐乕僟 RT僞僗僋儌僕儏乕儖 ,僞僢僠僙儞僒僪儔僀僶 - 僿僢僟柤
丂"defs_func.h" - 掕媊偡傞娭悢
extern StructEvode ModeEvode();
extern void GetPillar(Discover* discover,GetPillarMove* MoPillar);
extern int ReviLocation(GetPillarMove MovePt);
extern void GoStraight(int length,int flag);
extern int Rot_M(double rage);
extern int Rot_P(double rage);
- 婡擻
- 掕悢丒宆掕媊僿僢僟
- 婡擻
丂巊偆掕悢丒宆偺柤慜偺掕媊傪峴偆 - 偙偺僿僢僟僼傽僀儖傪棙梡偡傞儌乕僪丄婡擻儌僕儏乕儖丄僪儔僀僶丄RT僞僗僋側偳
夞旔儌乕僪 ,妉摼僩儗乕僗儌乕僪 ,曗彆扵嶕儌乕僪 ,億僗僩扵嶕儌乕僪 ,帺屓埵抲廋惓儌乕僪 ,捈恑儌僕儏乕儖 ,夞揮儌僕儏乕儖 ,挻壒攇僙儞僒 RT僞僗僋儌僕儏乕儖 ,PWM丒儘乕僞儕乕僄儞僐乕僟 RT僞僗僋儌僕儏乕儖 ,愒奜慄僙儞僒僪儔僀僶 PWM丒儘乕僞儕乕僄儞僐乕僟 RT僞僗僋儌僕儏乕儖 ,僞僢僠僙儞僒僪儔僀僶 - 僿僢僟柤
丂"defs_datas.h" - 掕媊偡傞曄悢
#define R (0)#define L (1)
#define END (0)
峔憿懱柤 GetPillarMove 掕媊 typedef struct{ int Lenght; double rage; int radius; }GetPillarMove;Length 拰傑偱偺嫍棧 rage 拰偺曽岦偺妏搙 radius 拰偺夞傞敿宎 峔憿懱柤 Discover 掕媊 typedef struct{ int Length; int flag; }Discover;Length 拰傑偱偺嫍棧 flag 塃偐嵍偐 峔憿懱柤 POSTDATA 掕媊 typedef struct{ int postnum; int x; int y; }POSTDATA;postnum 拰傪偲偭偨弴斣 x x嵗昗 y y嵗昗 峔憿懱柤 POINT 掕媊 typedef struct{ int radius; double rage; }POINT;radius 弶婜埵抲偐傜堏摦偟偨検 rage 堏摦偟偨妏搙 峔憿懱柤 StructEvode 掕媊 typedef struct{ int flag; POINT pt; }StructEvode;pt 忋婰嶲徠 flag 嵍塃偳偪傜偵恑傫偩偐
- 婡擻