2 .システム内の位置
図にMIRS0001のソフトウェアシステム内においてのタッチセンサデバイスドライバの位置を示す。
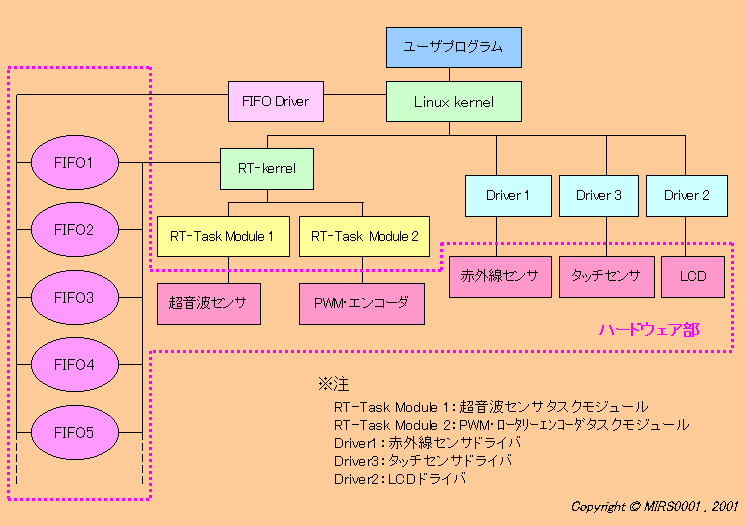
Fig.1 システム内のタッチセンサデバイスドライバの位置
3 .タッチセンサデバイスドライバの機能概要
タッチセンサデバイスドライバは、MIRS0001に搭載されるタッチセンサ、パワーオン信号のON/OFFを調べるためのLINUX用デバイスドライバである。
readメソッドでは、タッチセンサ・パワーオン信号を1度に全て読み込み、ioctlメソッドでは、メソッド内に用意した複数のコマンドを用いて、タッチセンサ・パワーオン信号をそれぞれ分けて読み込む。
図にタッチセンサデバイスドライバプログラム構成図を示す。
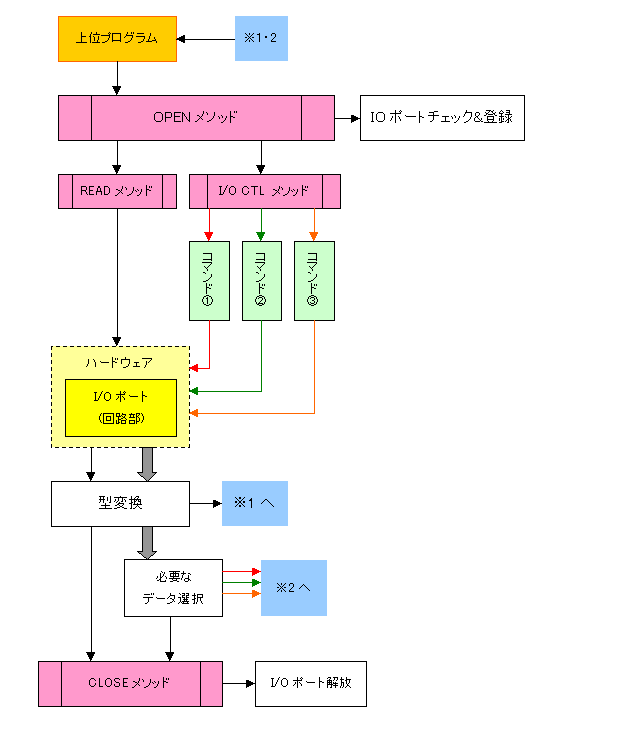
Fig.2 タッチセンサデバイスドライバプログラム構成図
上位プログラムで使用する関数・引数と、その関数が行う動作を以下に示す。
●int fc=open("/dev/ts",f_mode)
第1引数:タッチセンサドライバを指定
第2引数:ファイルの読み書きの属性(O_RDONLY、O_WRONLY、O_RDWR)
- タッチセンサデバイスドライバをopenすると、open時にI/Oポートアドレスのチェックと登録を行う。もしI/Oポートが使用中ならerrを返す。
- 第2引数のファイルの属性だが、このドライバはタッチセンサの状態を読み込むだけで書き込むことはないので、O_RDONLYにすることが望ましい。
●read(fc, char *data,size_t count,loff_t offset) 第1引数:タッチセンサドライバを指定 第2引数:各センサデータの格納領域 第3引数:センサデータのバイト数 第4引数:オフセット
- readメソッドは呼び出されると、タッチセンサセンサの現在の状況をI/Oポートからint型で読み込む。readメソッドのデータ格納領域はchar型で定義されている(変更不可能)ので、読み込んだint型のデータをchar型データに変換する。変換後、このchar型データをユーザ空間に書き込んでいる。
- データは1:ONで0:OFFであり、またタッチセンサ・パワーオン信号の順に格納されている。(ゆえにアドレス+1するごとにタッチセンサ0・1・2…の状態が確認できる。もしくは配列(例えばchar dat[7])を用意しておき、この配列の先頭アドレスをポインタ変数に代入しておけば、dat[0]にタッチセンサ0の状態、dat[1]にタッチセンサ1の状態というようにデータを格納することになり、後の処理がしやすくなる。)
- センサデータのバイト数は全部読み込んで7バイトである。(最大タッチセンサ6個、パワーオン信号1個なので。)
●ioctl(fc,int cmd_number,char *data) 第1引数:タッチセンサドライバを指定 第2引数:コマンド選択値 第3引数:センサデータの格納領域
- ioctl関数では第2引数の値によって選択したコマンドに対応して、タッチセンサ・パワーオン信号をそれそれ分けてユーザ空間に書き込む。データは、readメソッドと同じくint型のデータを型変換してchar型データとなっている。コマンドは4つ用意している。詳しくは4-3.ioctlメソッドのコマンドで述べる。
●close(fc) 第1引数:タッチセンサドライバを指定
- 引数にタッチセンサドライバファイルを指定すると、releaseメソッドがI/Oポートを開放してcloseする。
ioctl関数で引数として用いるコマンド選択値と表示設定値の対応および、それによって行われる動作について以下の表に示す。各センサのセンサ番号は、ボード開発の電子回路基板設計書のソフトウェアビジビリティに対応させている。(ioctl関数の第2引数は以下の表のコマンド(IRS_READ等)を代入する。)
| コマンド(cmd) |
コマンド値 |
最大読み込みバイト数 |
動作内容 |
| TS_READ |
1 |
6バイト |
タッチセンサのデータのみユーザ空間に読み込む。先頭アドレスにはタッチセンサ0のデータが格納されている。そして、その次にはタッチセンサ1のデータ、そのまた次はタッチセンサ2のデータ、というようにセンサデータが順に格納される(最大6個)。 |
| PO_READ |
2 |
1バイト |
パワーオン信号のみユーザ空間に読み込む。 |
| TS_HARDRESET |
3 |
― |
ドライバ利用度数リセット用コマンド。このコマンドがあることにより、いざというときドライバをアンロードできる。 |