杮僪僉儏儊儞僩偼丄MIRS0001婎杮愝寁彂(MIRS0001-DSGN-1001)偵婯掕偝傟偨 僔僗僥儉偺摦嶌婯掕丄忬懺慗堏傪幚尰偡傞奺僞僗僋偺奐敪乮僐乕僨傿儞僌丄帋尡摍乯偵昁 梫側帠崁傪弎傋傞丅
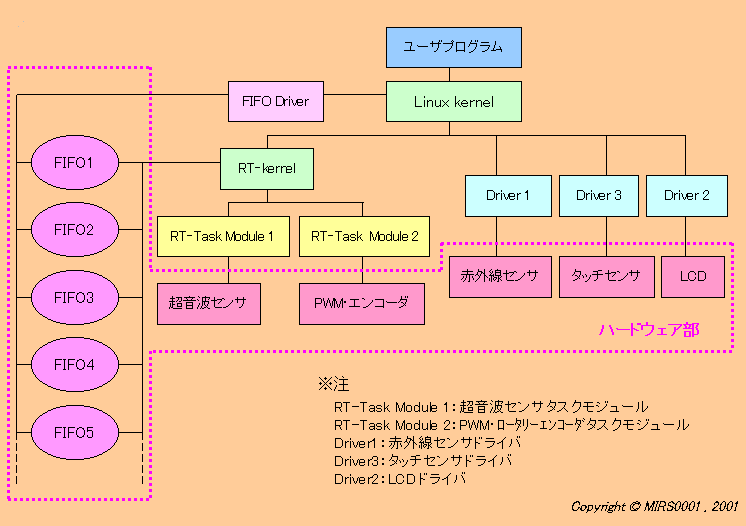
MIRS2000 僜僼僩僂僃傾偼丄RT-Linux 忋偱摦嶌偡傞僾儘僌儔儉孮偱峔惉偝傟傞丅
僾儘僌儔儉偼丄Linux 偺昗弨偺 API 偲偲傕偵丄峴摦儌乕僪偵懳墳偟偨僾儘僌儔儉丄堦偮偺婡擻傪暋悢偺僾儘僌儔儉孮偱採嫙偡傞婡擻儌僕儏乕儖丄偍傛傃丄RT僞僗僋丄僪儔僀僶偲丄曗彆娭悢偲撈帺偵掕媊偟偨僿僢僟僼傽僀儖偐傜峔惉偝傟傞丅
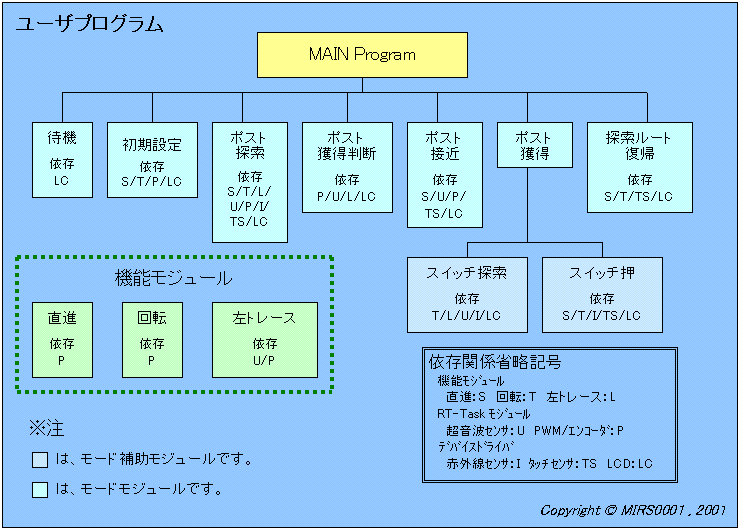
杮 MIRS 偱偼丄峴摦儌乕僪偵懳墳偟偨師偺7屄偺儌乕僪儌僕儏乕儖偲2屄偺儌乕僪曗彆儌僕儏乕儖傪梡堄偡傞丅
IO 惂屼偼丄挻壒攇應掕偲嬱摦宯偺惂屼傪 RT 僞僗僋偲偟偰嬱摦偝偣丄
愒奜慄僙儞僒怣崋擖椡扵抦偲丄LCD 弌椡偼丄僨僶僀僗僪儔僀僶傪梡偄偰峴偆丅
僨僶僀僗僪儔僀僶偼丄昗弨 API 偺僨僶僀僗僪儔僀僶傪棙梡偡傞丅
OS乮RT-Linux乯偺奣梫偵偮偄偰偼壓婰偺挷嵏曬崘彂傊丅
MIRS0001偺僾儘僌儔儉峔惉傪埲壓偺恾偵帵偡丅
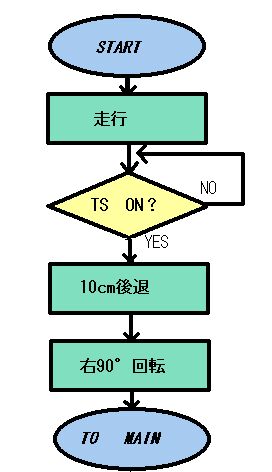
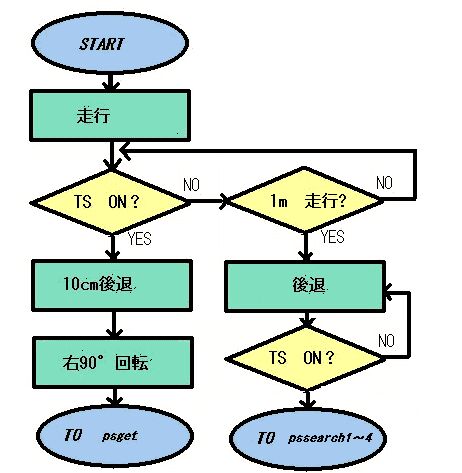
妉摼嵪偲敾抐丅仺億僗僩扵嶕儌乕僪
俹倂俵丒儘乕僞儕乕僄儞僐乕僟RT-僞僗僋儌僕儏乕儖
俴俠俢僨僶僀僗僪儔僀僶
俹倂俵丒儘乕僞儕乕僄儞僐乕僟RT-僞僗僋儌僕儏乕儖
俴俠俢僨僶僀僗僪儔僀僶
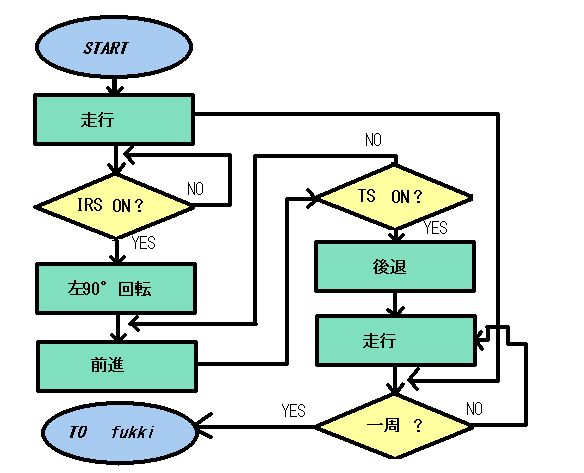
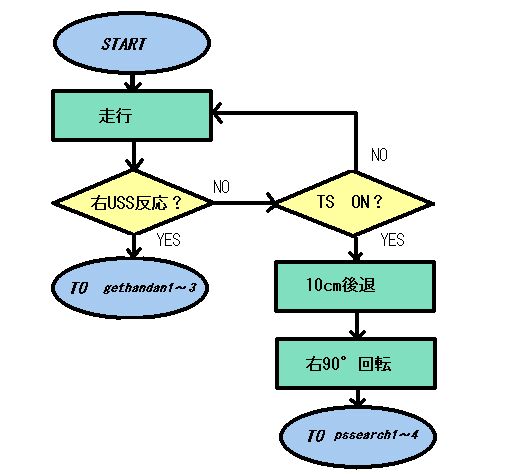
僞僢僠僙儞僒斀墳丅仺億僗僩扵嶕儌乕僪1乣4(1仺2丄2仺3丄3仺4丄4仺1)
俹倂俵丒儘乕僞儕乕僄儞僐乕僟RT-僞僗僋儌僕儏乕儖
挻壒攇僙儞僒RT-僞僗僋儌僕儏乕儖
僞僢僠僙儞僒僨僶僀僗僪儔僀僶
俴俠俢僨僶僀僗僪儔僀僶
妉摼嵪偲敾抐丅仺億僗僩扵嶕儌乕僪
俹倂俵丒儘乕僞儕乕僄儞僐乕僟RT-僞僗僋儌僕儏乕儖
挻壒攇僙儞僒RT-僞僗僋儌僕儏乕儖
俴俠俢僨僶僀僗僪儔僀僶
僞僢僠僙儞僒僨僶僀僗僪儔僀僶
俹倂俵丒儘乕僞儕乕僄儞僐乕僟RT-僞僗僋儌僕儏乕儖
挻壒攇僙儞僒RT-僞僗僋儌僕儏乕儖
俴俠俢僨僶僀僗僪儔僀僶
俹倂俵丒儘乕僞儕乕僄儞僐乕僟RT-僞僗僋儌僕儏乕儖
俹倂俵丒儘乕僞儕乕僄儞僐乕僟RT-僞僗僋儌僕儏乕儖
億僗僩扵嶕儌乕僪
妉摼敾抐儌乕僪
仸娭悢柤丄桪愭搙丄FIFO 偺巇條丄傾儖僑儕僘儉偵偮偄偰偼儕儞僋愭嶲徠丅
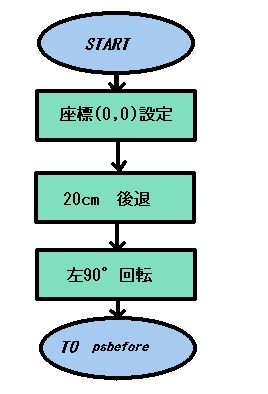
弶婜愝掕(摦嶌)儌乕僪
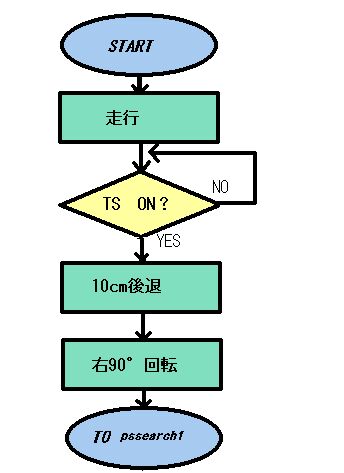
億僗僩扵嶕儌乕僪(1,2,3)
妉摼敾抐儌乕僪
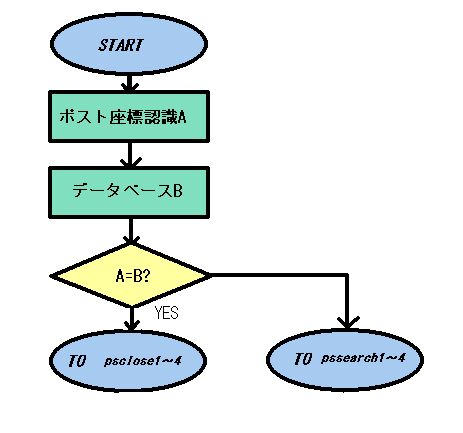
億僗僩愙嬤儌乕僪(1,2,3)
仸娭悢柤丄桪愭搙丄FIFO 偺巇條丄傾儖僑儕僘儉偵偮偄偰偼儕儞僋愭嶲徠丅