| 徖捗崅愱 揹巕惂屼岺妛壢 | ||||||
| ||||||
| 夵掶婰榐 | ||||||
|---|---|---|---|---|---|---|
| 斉悢 | 嶌惉擔 | 嶌惉幰 | 彸擣 | 夵掶撪梕 | ||
| A01 | 2002.2.15 | 嶳壓 | 抾懞 | 弶斉 | ||
| 奐敪崁栚 | 奐巒(寁夋) | 奐巒(嶌嬈) | 廔椆(寁夋) | 廔椆(嶌嬈) | |
| 峴摦寁夋専摙丒寛掕 | 2000/11/7 | 2000/11/7 | 2000/11/21 | 2000/11/21 | |
| 媄弍挷嵏 | 2000/12/12 | 2000/12/12 | 2001/1/9 | 2001/1/9 | |
| 婎杮愝寁 | 2001/1/11 | 2001/1/11 | 2001/2/1 | 2000/02/1 |
| 奐敪崁栚 | 奐巒(寁夋) | 奐巒(嶌嬈) | 廔椆(寁夋) | 廔椆(嶌嬈) | |
| 徻嵶愝寁彂(儊僇) | 2001/5/1 | 2001/5/1 | 2001/5/31 | 2001/6/22 | |
| 徻嵶愝寁彂(僄儗僉) | 2001/5/1 | 2001/5/1 | 2001/5/31 | 2001/7/10 | |
| 徻嵶愝寁彂(僜僼僩) | 2001/5/1 | 2001/5/1 | 2001/5/31 | 2001/7/3 | |
| 惢憿巇條彂 | 2001/6/1 | 2001/6/23 | 2001/6/15 | 2001/7/20 | |
| 惢憿(儊僇) | 2001/6/19 | 2001/8/20 | 2001/10/15 | 2001/9/18 | |
| 惢憿(僄儗僉) | 2001/6/19 | 2001/8/20 | 2001/10/15 | 2001/11/27 | |
| 惢憿(僜僼僩) | 2001/6/19 | 2001/8/20 | 2002/11/23 | 2002/1/20 | |
| 夵慞愝寁 夵慞(儊僇) | 2001/8/1 | 2001/10/1 | 2001/9/31 | 2002/1/24 | |
| 夵慞愝寁 夵慞(僄儗僉) | 2001/10/16 | 2001/11/28 | 2001/11/30 | 2002/1/24 | |
| 夵慞愝寁 夵慞(僜僼僩) | 2001/11/30 | 2002/1/20 | 2002/2/8 | 2002/2/8 | |
| 僪僉儏儊儞僩惍棟(儊僇) | 2002/01/09 | 2001/12/1 | 2002/2/15 | 2002/2/15 | |
| 僪僉儏儊儞僩惍棟(僄儗僉) | 2002/01/09 | 2002/1/25 | 2002/2/15 | 2002/2/15 | |
| 僪僉儏儊儞僩惍棟(僜僼僩) | 2002/02/01 | 2001/2/15 | 2002/2/10 | 2002/02/15 |
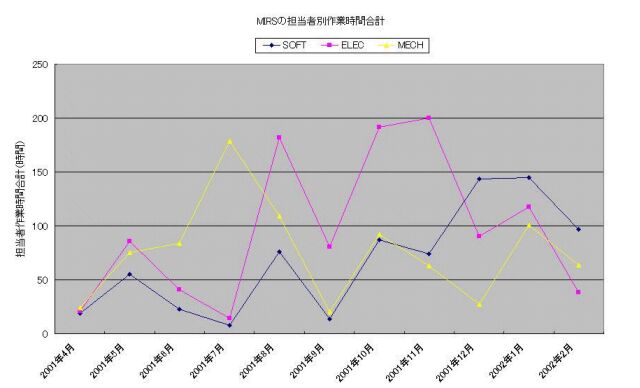
埲忋偑奐敪寁夋偲懳斾偝偣偨奐敪夁掱偱偁傞丅寁夋偲幚嶌嬈偑偐側傝偢傟偰偟傑偭偨丅
寁夋偳偍傝恑傑偣傞偙偲偑戝曄偱偁傞偙偲傪抦偭偨丅
埲壓偺僪僉儏儊儞僩傪嶲峫偲偡傞丅
| 1夞栚 | 2夞栚 | 崌寁 | 弴埵 | ||||
| 妉摼悢 | 僞僀儉 | 妉摼悢 | 僞僀儉 | 妉摼悢 | 僞僀儉 | ||
| 1斍 | 5 | 3暘12昩 | 4 | 3暘2昩 | 9 | 6暘14昩 | 1 |
| 2斍 | 5 | 4暘3昩 | 4 | 2暘59昩 | 9 | 7暘2昩 | 2 |
| 3斍 | 2 | 1暘12昩 | 2 | 2暘45昩 | 4 | 4暘7昩 | 5 |
| 4斍 | 2 | 3暘28昩 | 3 | 3暘13昩 | 5 | 6暘41昩 | 4 |
| 5斍 | 4 | 5暘 | 2 | 5暘 | 6 | 10暘 | 3 |
尒帠桪彑傪彑偪庢傝傑偟偨丅
嵟屻偵僞僢僠僙儞僒偺僶儞僷偑億僗僩偵傂偭偐偐偭偰偟傑偄巆擮丒丒丒丅
杮摉側傜10屄偡傋偰偲傟偨偼偢側偺偵乧丅
| 奐敪崁栚 | 岺悢(h) | |
| 儊僇(3恖) | 001.挷嵏丄妛廗 | 3.0 |
| 002.僔僗僥儉奐敪寁夋棫埬 | 11.5 | |
| 003.婎杮愝寁 | 0.0 | |
| 004.徻嵶愝寁 | 331.5 | |
| 005.惢憿 | 242.5 | |
| 006.僒僽僔僗僥儉帋尡 | 53.5 | |
| 007.僔僗僥儉帋尡 | 0.0 | |
| 008.夵慞愝寁 | 21.0 | |
| 009.僪僉儏儊儞僩惍旛 | 68.0 | |
| 010.儈乕僥傿儞僌 | 3.0 | |
| 011.偦偺懠 | 60.0 | |
| 794.0 | ||
| 僄儗僉(3恖) | 001.挷嵏丄妛廗 | 9.0 |
| 002.僔僗僥儉奐敪寁夋棫埬 | 7.5 | |
| 003.婎杮愝寁 | 0.0 | |
| 004.徻嵶愝寁 | 143.5 | |
| 005.惢憿 | 438.5 | |
| 006.僒僽僔僗僥儉帋尡 | 158.0 | |
| 007.僔僗僥儉帋尡 | 18.0 | |
| 008.夵慞愝寁 | 65.5 | |
| 009.僪僉儏儊儞僩惍旛 | 138.0 | |
| 010.儈乕僥傿儞僌 | 3.5 | |
| 011.偦偺懠 | 79.5 | |
| 1061.0 | ||
| 僜僼僩(2恖) | 001.挷嵏丄妛廗 | 1.5 |
| 002.僔僗僥儉奐敪寁夋棫埬 | 10.5 | |
| 003.婎杮愝寁 | 0.0 | |
| 004.徻嵶愝寁 | 74.5 | |
| 005.惢憿 | 409.5 | |
| 006.僒僽僔僗僥儉帋尡 | 107.0 | |
| 007.僔僗僥儉帋尡 | 27.0 | |
| 008.夵慞愝寁 | 12.0 | |
| 009.僪僉儏儊儞僩惍旛 | 5.5 | |
| 010.儈乕僥傿儞僌 | 2.0 | |
| 011.偦偺懠 | 91.5 | |
| 741.0 | ||
| 栤戣揰 | 尨場 | 夝寛嶔 | |
| 1 | 憱峴拞丄幵懱杮懱偺懁柺偑暻偵徴撍偟偰傕丄婥晅偐偢偵偦偺傑傑恑傕偆偲偡傞丅 | 懁柺偺忈奞暔傪姶抦偡傞僙儞僒偑USS偺傒側偺偱丄USS偺姶搙偑埆偄偲幵懱偺墶偵壗偑偁傞偐慡偔敾傜側偄丅 | 偁傞掱搙懁柺傑偱姶抦偱偒傞傛偆偵丄慜懁柺偺僶儞僷乕偺暆傪奼戝偟偨丅 |
| 2 | 僶儞僷乕偺摦偒偑廰偔偰丄栠傜側偄偙偲偑偁傞丅 | 僔儍乕僔偲僶儞僷乕偵偁偗偨挶斣庢晅偗偺偨傔偺寠偑悺朄偲偢傟偰偄偨偨傔丄挶斣偑偹偠傟偰掞峈椡偑惗偠偰偄 偨丅 | 庢晅偗寠傪奼戝偟偰丄悺朄偵梋桾傪帩偨偣偨丅偦傟偱傕夝寛偟側偄応崌偼丄庢晅偗傞僱僕傪 彮偟娚傔偰懳張偟偨丅 |
| 3 | 憱峴拞丄嬌抂偵幵懍偑抶偔側傞丅 | 僉儍僗僞乕偑掞峈偲側傝丄僼傿乕儖僪偲偺杸嶤偑憹偊傞偙偲偵婲場偡傞丅 | 僉儍僗僞乕偺庢晅偗埵抲傪彮偟忋曽偵偢傜偟偨丅 |
| 4 | 攝晍偝傟偨晹昳乮MIRSATLM-ASBY-1005乯傪巊偆偲丄ISA儃乕僪偑屌掕偟偯傜偄丅 | 偡偖偢傟傞丅 | 怴偨側晹昳乮MIRS0001-ASSY-1036乯傪嶌傝丄屌掕曽朄傪曄峏偟偨丅 |
| 5 | 慜懁晹僶儞僷乕偑億僗僩偺僗僀僢僠偵堷偭偐偐傞丅 | 愒奜慄傪姶抦偟億僗僩偲懳柺偟傛偆偲幵懱傪90搙慁夞偝偣傞偲偒丄慁夞懍搙偑懍偄偲墦怱椡偱僶儞僷乕偑奜懁偵奐偒丄億僗僩偵傇偮偐偭偰偟傑偆丅 | 嫞媄拞弶傔偰惗偠偨栤戣揰偱偁傝丄尰嵼價僯乕儖僥乕僾傪揬偭偰懳墳偟偰偄傞丅 |
| 栤戣揰 | 尨場 | 夝寛嶔 | |
| 1 | 挻壒攇僙儞僒偺僥僗僩僾儘僌儔儉傪憱傜偣偰傕2偐3偐4偺抣偟偐弌側偄丅 | 丒挻壒攇僙儞僒偐傜偺擖椡偑忢偵"1"偵側偭偰偄偨丅 丒僪乕僞乕儃乕僪忋偱僔儑乕僩偟偰偄傞強偑偁偭偨丅 |
丒挻壒攇僙儞僒偺壜曄掞峈傪挷惍偟偰憹暆搙傪挷惍偟偨丅 丒僔儑乕僩偟偰偄傞強傪掶惓偟偨丅 |
| 2 | 挻壒攇僙儞僒偺僥僗僩僾儘僌儔儉傪憱傜偣傞偲忢偵999偲偄偆抣偑昞帵偝傟偨丅 | FPGA撪偺夞楬僨乕僞偱丄挻壒攇僙儞僒偺晹暘偺妱傝崬傒傪弌偡僺儞偺僺儞攝抲偑娫 堘偭偰偄偨丅 | 僺儞攝抲傪FPGA偺庢傝埖偄愢柧彂偱挷傋偰惓偟偄僺儞攝抲傪偟偨丅 |
| 3 | FPGA偺夞楬僨乕僞乮TTF僼傽僀儖乯傪FPGA偵僟僂儞儘乕僪偱偒側偄丅 | ISABUS忋偵偮側偑傞僺儞偵懳偟偰丄側偵傕巤偝側偐偭偨丅 | BUS偵娭學偡傞PIN偺偡傋偰傪僴僀僀儞僺乕僟儞僗偵偟偨丅 |
| 4 | ttf僼傽僀儖傪download偟傛偆偲丄偡傞偲"download fail"僩昞帵偝傟傞丅偦偺1 | 夞楬僨乕僞偱巊偆僎乕僩悢傪尭傜偡偨傔偵傾僪儗僗儗僐乕僟乕偱傾僪儗僗偺奅8bit偩偗傪 嶲徠偟偰偄偨偺偩偑丄忋埵偺傾僪儗僗傕嶲徠偟側偗傟偽懠偺傾僪儗僗偑屇傃弌偝傟偨偲偒偱傕斀墳偟偰偟 傑偆偲偄偆僶僌偑偁偭偨丅 | 傾僪儗僗偼丄16bit偢傋偰傪嶲徠偟偰儌僕儏乕儖傪慖戰偡傞傛偆偵偟偨丅 |
| 5 | ttf僼傽僀儖傪download偟傛偆偲丄偡傞偲"download fail"僩昞帵偝傟傞丅偦偺2 | IO-read偺怣崋偼晧榑棟偱偁傞偺偵丄惓榑棟偱峫偊偰夞楬傪嶌偭偰偄偨丅 | 夞楬偵not傪晅偗壛偊偰斀揮偡傞偙偲偱夝寛偟偨丅 |
| 6 | 揹尮儃乕僪偐傜俆V偺揹埑偑嫙媼偝傟側偄丅 | 婎斦忋偺夞楬偑娫堘偭偰偄偨丅 | 娫堘偭偰偄傞偲偙傠傪扵偟丄夵憿曬崘彂偺偲偍傝偵廋惓傪巤偟偨丅 |
| 7 | 晞崋壔偡傞傛偆偵嶌惉偟偨愒奜慄僙儞僒儌僕儏乕儖偐傜怣崋偑傛傔側偄丅 | 愒奜慄僙儞僒偼晧榑棟偱偁傞偺偵丄惓榑棟偱峫偊偰夞楬傪嶌惉偟偰偄偨丅 | not傪夞楬忋偵晅偗壛偊偰廋惓偟偨丅 |
| 8 | 揹尮偑撍慠棊偪偰偟傑偆丅 | 丒僶僢僥儕乕偺偺揹埑偑掅壓偟偨丅 丒埨掕壔偱揹尮偑幚嵺偵巊偭偰偄傞偲晄埨掕偱偁傞丅 |
丒廩揹偝傟偨僶僢僥儕乕偵庢傝懼偊傞丅 丒埨掕壔揹尮偺揹埑偼彮偟崅傔偵愝掕偡傞丅乮俋倁偔傜偄乯 |
| 9 | 傂偲偮偩偗僞僢僠僙儞僒偑斀墳偟側偄丅 | 僐僱僋僞偺愙怗晄椙丅 | 僴僂僕儞僌傪晅偗側偍偟丄僐僱僋僞傪捈偟偨.丅 |
| 10 | 儌乕僞乕惂屼偺僥僗僩僾儘僌儔儉偱丄懍搙-100偱夞揮偝偣傞偲儌乕僞乕偼掆巭偟偰偟傑偭 偨丅傑偨丄-1偱堦斣懍偔夞揮偡傞丅 | 儌乕僞乕惂屼梡偺俬俠偺婡擻偲偟偰,屻傠廃傝偺偲偒偵俹倂俵怣崋傕斀揮偟偰偟傑偭偰偄 偨丅 | 俥俹俧俙撪晹夞楬僨乕僞偺俹倂俵惂屼儌僕儏乕儖偺晹暘偱廋惓傪壛偊偨丅徻偟偔偼丄曽 岦僨乕僞偲懍搙僨乕僞偱曄挷偟偨俹倂俵怣崋偺EX-OR傪弌椡偲偟偰嵍塃偺儌乕僞乕偵弌椡偟偨丅 |
| 栤戣揰 | 尨場 | 夝寛嶔 | |
| 1 | 撉傒崬傒傾僪儗僗傪曄偊傞偲昗弨MIRS偱偺僥僗僩偑偱偒側偔側傝丄帺僠乕儉偺FPGA偑埨掕偡傞傑偱丄僥僗僩偑
弌棃側偄丅傛偭偰奐敪偑掆懾偡傞丅
| MIRS0001偲昗弨MIRS偺巇條偑堎側傞丅 | 僄儗僉偺僿儖僾偵傑傢傞丅 |
| 2 | 僪儔僀僶偲FPGA夞楬傪椉曽嶌惉偡傞応崌丄偳偪傜偑尨場偱晄嬶崌偑偍偒傞偺偐暘偐傝偵偔偄丅 | 僪儔僀僶丄FPGA偲傕偵揙掙晄懌丅 | 僜僼僩僂僃傾偺僄儔乕偼晛捠偺僾儘僌儔儉偲摨條廋惓偡傟偽傛偄偑丄僪儔僀僶偼巜掕偝傟偨傾僪儗僗傪撉傓偩偗 偱偁傞偺偱丄FPGA偺僄儔乕傪偦偺傑傑捠偟偰偟傑偆丅僄儗僉偲柸枾偵楢棈傪庢偭偰丄憗傔憗傔偵懳墳偡傞昁梫偑偁傞丅僜僼僩僂僃傾偺僄儔乕偼晛捠偺僾儘僌儔儉偲摨條偵廋惓偡傟偽傛偄偑丄僪儔僀僶偼巜掕偝傟偨傾僪儗僗傪撉傓偩偗偱偁傞偺偱丄FPGA偺僄儔乕傪偦偺傑傑捠偟偰偟傑偆丅僄儗僉偲柸枾偵楢棈傪庢偭偰丄憗傔憗傔偵懳墳偡傞昁梫 偑偁傞丅 |
| 3 | 嵗昗偺棉袄偑偆傑偔婰壇偱偒側偄丅 | 挻壒攇丄儘乕僞儕僄儞僐乕僟偺抣偑濨枂偱偁傞丅 | 壗搙傕MIRS傪憱傜偣嵗昗偑偆傑偔弌傞傛偆僾儘僌儔儉傪挷惍偟偨丅 |
| 4 | 捈恑偱偒側偄丅 | 傑偭偡偖憱傞偺偵嵍塃偺僞僀儎偺懍搙傪梌偊偰偄傞偩偗偩偭偨丅 | 嵍塃偺僞僀儎偺懍搙傪梌偊偰偄傞偩偗偩偲丄嫞媄応側偳偺塭嬁偱搑拞偐傜嵍塃偺僞僀儎偺懍搙偑堎側偭偰偔傞丅嵍塃偺僞僀儎偺懍搙斾偑堦掕偵側傞傛偆僼傿乕僪僶僢僋偡傞僾儘僌儔儉傪慻傫偩丅 |
| 5 | 偆傑偔億僗僩偺廃傝傪廃夞偱偒側偄丅 | 捈恑偺偲偒偲摨條丄嵍塃偺僞僀儎偺懍搙傪梌偊偰偄傞偩偗偩偭偨丅 | 捈恑偺偲偒偲摨條丄嵍塃偺僞僀儎偺懍搙斾偑堦掕偵側傞傛偆僼傿乕僪僶僢僋偡傞僾儘僌儔儉傪慻傫偩丅 |
| 6 | 億僗僩偺廃夞偑堦廃傄偭偨傝偲傑傟側偄丅 | 枅夞憱傜偣傞偨傃偵丄廃夞婳摴偑嫞媄応側偳偺奜棎偵傛傝偢傟傞丅 | 僼傿乕僪僶僢僋偑偁傑偐偭偨偲巚傢傟傞偐傜丄僾儘僌儔儉傪帋峴嶖岆偟偰夵椙偟偨丅偦傟偱傕傑偩旝柇偵偢傟傞偐傜丄壗夞傕憱傜偣偰堦斣偆傑偔偄偔抣傪尒偮偗弌偟偨丅 |
| 7 | 巜掕偟偨嫍棧偱偲傑傟側偄丅 | 儘乕僞儕僄儞僐乕僟偺僐僱僋僞愙怗晄椙丅 | 僴僂僕儞僌傪晅偗側偍偟丄僐僱僋僞傪捈偟偨.丅 |
| 8 | halt偱偒側偄丄僐儞僷僀儖偱偒側偄丄OS偑棫偪忋偑傜側偄丅 | OS偺懝彎丅 | OS偺嵞僀儞僗僩乕儖丅 |
| 9 | OS偑棫偪忋偑傜側偄俀丅 | CPU儃乕僪偺懝彎丅(側偤儃乕僪偑懝彎偟偨偐偼晄柧偱偁傞丅) | CPU儃乕僪岎姺丅 |
USS偵娭偟偰偼嫞媄夛嬤偔偵擇偮偺屘忈偑敪尒偝傟偨偨傔丄尨場傕傑偩夝柧偱偒偰偄側偄丅
恎摦偒偱偒側偔側偭偨応崌偵偮偄偰偼丄偙傟偼嫞媄夛杮斣偱弶傔偰偍偒偨帠審偱偁傝(偟偐傕嵟屻偺億僗僩傪妉摼偡傞偲偒)丄偦傫側偙偲傑偱峫椂偟偰偄側偐偭偨丅
杮斣偵偼壗偑偍偙傞偐傢偐傜側偄乧丅
慡懱揑側斀徣揰偲偟偰偼傗偼傝寁夋惈偱偁傠偆丅
帺暘偨偪偼偟偭偐傝寁夋偟偰偄傞偮傕傝偱偁偭偰傕幚嵺嶌嬈偵偼偄偭偰偄偔偲偦偺寁夋偳偍傝偵偼偟偭偔傝偄偐側偐偭偨丅
嶌嬈偺恑傔曽偵傕栤戣偼偁偭偨偐傕偟傟側偄偑丄寁夋偑晄廫暘偱偁偭偨偙偲傕傕偪傠傫偁傞偩傠偆丅
儊僇:
僄儗僉丗
| 娭楢暥彂 |
|---|
{kind=link}