①Direction Board(DB,数字盤)
(ア) DBは,T字路およびのれんに設置される.
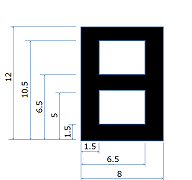
(イ) 黒で書かれた4つの数字とそれを仕分ける2本の直線からなる.
(ウ) DBから50cm手前に幅5cmの白線を引く.
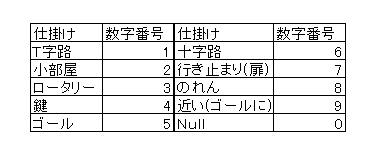
(エ) 各数字はその次にある仕掛けを示す,9はゴールに近いコースであることを示し,0は情報なしを示す
(オ) 詳細な寸法は下図に示す.
1.競議会プログラム
1.開会の言葉
2.実行委員長の挨拶
3.審査員紹介
4.競技説明
5.競技一回目・各チームによるプレゼンテーション
6.休憩
7.競技二回目
8.結果発表
9.表彰・議評
10.閉会の言葉
11.片づけ
2.MIRSとは
沼津高専電子制御工学科では,1988年より自律移動ロボット(Micro Intelligent Robot System:以下MIRSと呼ぶ)の製作をカリキュラムに取り入れています.このカリキュラムでは,ものづくりを通して創造性の育成と,ドキュメントの作成や管理などを含めたシステムの設計・開発のプロセス全般を学習することを目的としています.従って,企画に始まって基本設計,詳細設計,試作,評価,改良設計といった一連のプロセスが,企業とほぼ同様に行われます.
昨年度、ロボットの車体とシステムが大幅に変更されて、競議内容が変わり、MG3(MIRS Generation 3)として新たな時代が幕を開けました。
3.競議説明
Ⅰ.競技名 「超MIRS迷宮」
Ⅱ. 競技内容 競技場内の仕掛けをクリアし,ゴールまでの時間を争う自律移動ロボットによる競技.
Ⅲ. 競技規定
1. 試技
①試技は2回行う.1回の制限時間は5分とする.
②順位は2回の試技の合計点で決まる.
③ロボットがゴールするか,制限時間が経過した場合に試技は終了する.
④試技の途中での危険を認める.棄権した場合,これまでの得点は加算される.
⑤試技1回目の順番はくじ引きで決める.
⑥試技2回目の競技順は試技1回目の得点の低いものから行う.
⑦試技1,2回のそれぞれの間にハードウェア,ソフトウェアの変更を行ってもよい.
2. ロボット
①一体型で1台でなければならない.
②競技中に分離してはならない.
③自律型でなければならない.
④ロボットの大きさは,競技開始時において底面が35cm×35cm以内に収まるものとする.
⑤電源は,ロボット自身に搭載する電池のみとする.
3. 競技場
①競技場の大きさは5.0m× 5.0mとする.
②壁は高さが33cmで上部2cmに黒色のテープを貼る.
③壁の色は透明である.
④競技場の安定性を高める為,通路の一部を補強する.
⑤床には緑色のピラマットを敷く.
4. 競技場内の仕掛け
①Direction Board(DB,数字盤)
(ア) DBは,T字路およびのれんに設置される.
(イ) 黒で書かれた4つの数字とそれを仕分ける2本の直線からなる.
(ウ) DBから50cm手前に幅5cmの白線を引く.
(エ) 各数字はその次にある仕掛けを示す,9はゴールに近いコースであることを示し,0は情報なしを示す
(オ) 詳細な寸法は下図に示す.
②ロータリー
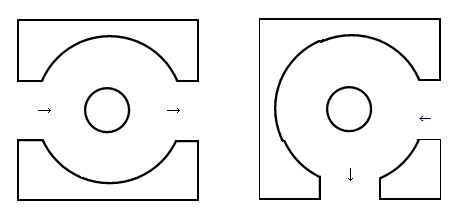
(ア) 1.5m×1.5mの部屋の中心に直径50cmの円筒形の内壁を設置する.
(イ) 直径50cmの内壁と同じ中心点から直径100cmの外壁を設置する.
(ウ) 外壁には,上下左右のいずれかに幅50cmの入り口と出口がある.
(エ) 車体が出口から完全に出た場合にクリアとみなし,得点が加算される.
(オ) 詳細な寸法は下図に示す.
③小部屋
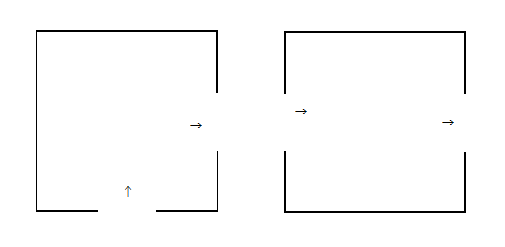
(ア) 広さ1.5m×1.5mの部屋で,各辺のいずれかに幅50cmの入り口と出口がある.
(イ) 車体が出口から完全に出た場合クリアとみなし,得点が加算される.
(ウ) 詳細な寸法は下図に示す.
④シーソー
(ア) シーソーの大きさは,幅45cm長さ90cmとする.
(イ) 高さは45cm地点で10cmとする.
(ウ) 車体がシーソーを乗り越え,下りきった場合にクリアとみなし,得点が加算される.
(エ) シーソーはDBでの予告なしに設置される.
⑤鍵(AP)
(ア) 赤外線発生装置のついた壁で,タッチセンサを押すことで扉が開く.
(イ) タッチセンサを押下後、LEDが点灯した場合にクリアとみなし、得点が加算される.
(ウ) 赤外線LEDの高さは床から11cmである.
⑥扉
(ア) 鍵のタッチセンサを押すことにより自動で開く.
(イ) 平常時は壁と同意である.
(ウ) 鍵を獲得することなく、強行突破で通り抜けても得点は与えられない.
⑦ステップ
(ア) 最大高12mm幅60cmケーブルシースを用いる.
(イ) 35cm間隔で2本のケーブルシースを設置する.
(ウ) 2本のケーブルシースを完全に超えた場合にクリアとみなし,得点が加算される.
(エ) ステップはDBでの予告なしに設置される.
⑧通路
(ア) 幅50cmの基本的な道.
(イ) T字路に正面には必ずDB(数字盤)を設け,この先の仕掛けを示す.
⑨行き止まり
(ア) 必ず袋小路になっている.
(イ) 無得点である.
⑩十字路
(ア) 十字路の進入口は1ヵ所、出口は3ヵ所である.
(イ) のれんを完全にくぐり抜けた場合に得点が加算される.
(ウ) 一度あるのれんをくぐり得点した後、十字路に戻り別ののれんをくぐった場合はさらに得点が加算される.
⑪ゴール
(ア) ゴールエリアでは,床一面を白色にする.
(イ) 機体全てゴールエリアに入り,そこで停止すればゴール点獲得とみなす.
5. 順位及び判定
①競技順位は,本戦2回の競技の合計獲得ポイント数が多いものを上位とする.
②各仕掛けのクリアに対する獲得ポイントは以下のとおりする.
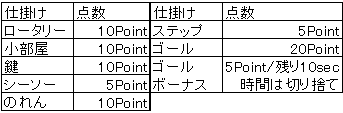
③合計獲得ポイントが同じ場合は,2回の合計消費時間が短いものを上位とする.
6. 禁止事項
①選手はスタート時にロボットの起動スイッチを押すことを除き,協議中にロボットに触れてはならない.
②競技場内に設置された壁を乗り越えてはならない.
③MIRSは競技場にダメージを与えるような動作をしてはならない.