MIRSのMPUボードを新しくする事によって今までより多くの電流が必要となった。また、今度のMPUボードでは通信機能としてRS-232Cを備えている。このため従来用いてきた電源制御ボードをそのまま使う事が困難となった。そのためこれらの要求に対応した、新たな電源制御ボードを開発する。
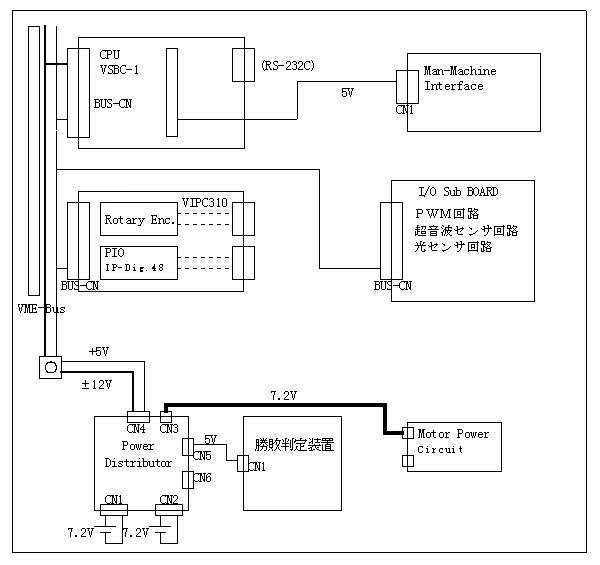
電源系統図を図1-1に示す。この図にしたがって各ボードに電源を送る。ここで、このボードの最大出力電流について考える。まずMPUボードのVSBC-1では750mA、I/OボードのVIPC310は460mA、IP-digital 48 は220mA消費する。その他の回路によって、1A程流れるものと思われる。これらを合計すると2.43Aである。よって放熱等のため少し余裕を見て、最大電流が3Vで設計する。
|
|
| 図1ー1 電源系統図 |
電源制御ボードは、主に3つの機能を 持つ。
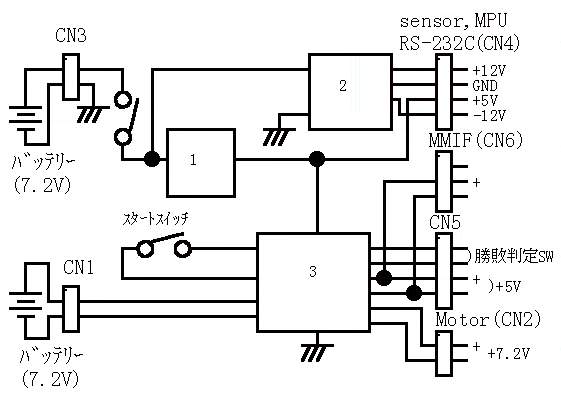
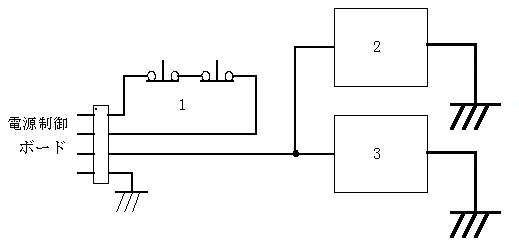
図1-2に構成図を示す。図1-2中の1から3の機能について説明する。
|
| 図1-2 構成図 |
(1) 機能設計
各機能について詳しく述べる。
①定電圧電源
この部分では、MIRS上の全ての回路に電力を供給するための回路である。電源としては、ラジコン用の7.2Vのニッカド充電用電池を用いる。これはフル充電では8Vほどまであるが、そのうち電圧は落ちてくる。通常の定電圧レギュレータICを用いると、5Vを発生させる為には7V近く必要となり、これでは電圧が落ちてきた時に安定した電力を供給することができなくなってしまう。そのため今回は、抵損失のレギュレータ(最低入力電圧6.0V)を用いる。また、今回は3Aというかなり大きな電流が必要となり、ここではそれだけの電流を流しだす事が出来るようにする。
②DC-DCコンバータ
この部分は、RS-232Cを使用するための電源となる。必要な電圧および電流は、±12V、100mAである。
③ON-OFF制御部
この部分では、スタートスイッチが押されたら、勝敗判定装置及びモータに電力を供給し、勝敗判定装置が押されたら、それらをOFFにするための回路である。また。MPUボードにそのON,OFFの信号を送信する機能も兼ねている。ここは、リレーによる1ビットのデータ保持機能を持つ回路となっている。
(2) 部品選択
次に特殊な部品について述べる。
①STR9005(サンケン)
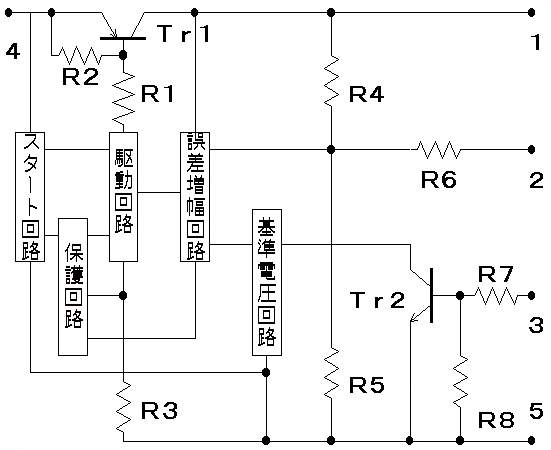
この部品は、抵損失リニアレギュレータICと呼ばれている部品である。最低6.0Vの入力電圧を5Vの出力電圧にする。また最大出力電流も4Aであり、今回の規格に適当である為、使用する。以下に内部の等価回路図1-3に示す。この中で、ドライブ用トランジスタTr1及び可変シャントレギュレータにより最低入力電圧6.0Vを実現している。
|
| 図1-3 STR9005等価回路図 |
②SQ-12D-250(アジア電子)
この部品は、DC-DCコンバータと呼ばれる部品である。入力電圧は4.5V~9Vなので、バッテリーをそのまま入力しても安全である。出力も±12V、±250mAで今回の規格には充分である。
③53259-0*20(MOLEX)
今回電源基板は3Aという大電流を流さなければならないしかし、これまで使用してきた電源用のコネクタは大きく、今回開発しようとするボードに載せる事は困難である。そこで、今回はこのMOLEXを用いる事となった。これは、2ピンのものでこれまでより10%、4ピンのもので40%小さくなる。また、このMOLEXは5Aまで流す事ができ、今回開発する基板に適当である。
④放熱板
この部品は、STR9005の仕様書から計算して寸法を決定した。
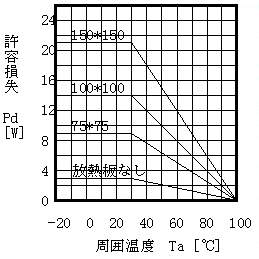
今回の使用条件は、以下のような場合を考えた。
3[V]*3[A]=9[W]
である。放熱板の面積と、損失電力の関係は、図1-4のとおりである。よって、必要な放熱板の面積は、5625[cm2]となる。
|
| 図1-4 Ta-Pd特性 |
Power Distributor
本ボードのコネクタのピンアサインについて述べる。
コネクタ1,3
| No. | 信号名 | 方向 | 内容 |
| 1 | Vin | ← | +7.2Vの電源(バッテリー)を入力する。 |
| 2 | GND | -- |
コネクタ2
| No. | 信号名 | 方向 | 内容 |
| 1 | Vout | → | +7.2Vの電圧を持つ電力を供給する。(モータ用) |
| 2 | GND | -- |
コネクタ4
| No. | 信号名 | 方向 | ||
| 1 | V+ | → | +12Vを出力 | MPU,センサ系のボードの電源となる。 |
| 2 | GND | -- | GND | |
| 3 | Vcc | → | +5Vを出力 | |
| 4 | V- | → | -12Vを出力 | |
コネクタ5
| No. | 信号名 | 方向 | ||
| 1 | SWA | → | +12Vを出力 | 勝敗判定装置からのデータを得る。 |
| 2 | SWB | ← | GND | |
| 3 | Vsig | → | +5Vを出力 | スタートから勝敗判定SWを押されるまで+5Vを出力 |
| 4 | GND | -- | -12Vを出力 | |
コネクタ6
| No. | 信号名 | 方向 | |
| 1 | OPEN | -- | 信号なし |
| 2 | Vsig | → | スタートから勝敗判定SWを押されるまで+5Vを出力 |
| 3 | GND | -- |
←はボードへの入力、→はボードからの 出力、--は方向が無いことをあらわす。
基板配置図を図1-5に示す。
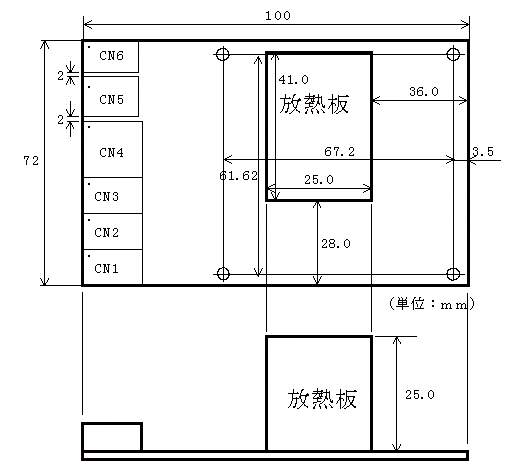
|
| 図1-5 基板配置図(Power Distributor) |
コネクタの品名
CN1:MOLEX(53259-0220):9.1 × 14.2 (mm)
CN2:MOLEX(53259-0220):9.1 × 14.2 (mm)
CN3:MOLEX(53259-0220):9.1 × 14.2 (mm)
CN5:MOLEX(5046-04A) :9.5 × 13.3 (mm)
CN6:MOLEX(5046-03A) :7.0 × 13.3 (mm)
勝敗判定装置は、次の2つの機能を持つ。
構成図を図1-6に示す。図1-6中の1から3の機能について説明する。
|
| 図1-6 勝敗判定装置構成図 |
(1) 機能設計
各機能について詳しく述べる。
①勝敗判定用スイッチ
この部分は、相手MIRSに押された事を感知するための装置である。回路としては、ノーマルコネクトのスイッチを用いて、押された事によってこのスイッチが切られた時にPower Distributorボードに押された事が伝わるようになっている。
②LED発光回路
この部分は、通常のLEDを発光させるための回路である。赤外線は人の目には見えないので、この機能をつけた。
③赤外LED発光回路
この部分は、赤外線LEDを発光するための回路である。今回使用した赤外線受光素子IS1U60は、38kHzでパルス発光された赤外線しか受光しないようになっている。この事は、余分な赤外線を遮断する上で大切な機能である。しかし、そのため、38kHzでパルス発光しなければならない。また、この受光素子は、38kHzでパルス発光された赤外線でも常に発光され続けているものはノイズとみなしてしまう。そのため、さらにこの赤外線を600μsで変調する。これらの発振回路はタイマICμPD5555を用いている。また、赤外線LEDのドライバICとして、SN75453(デュアルぺリフェラルORゲートIC)を用いた。
(2) 部品選択
次に特殊な部品について述べる。
①TLN105B(東芝)
この部品は、赤外線を発光するために使用した。この素子の特性を以下の示す。
最大定格(Ta=25℃)
| 項目 | 記号 | 定格 | 単位 |
| 直流順電流 | IF | 100 | mA |
| 直流順電流低減率 (Ta>25℃) | ΔIF/℃ | -1.33 | mA/℃ |
| パルス順電流 | IFP(注) | 1 | A |
| 直流逆電圧 | VR | 5 | V |
| PD | 150 | mW | |
| 動作温度 | Topr | -20~75 | ℃ |
| 保存温度 | Tstg | -30~100 | ℃ |
電気的特性(Ta=25℃)
| 項目 | 記号 | 測定条件 | 最小 | 標準 | 最大 | 単位 |
| 順電圧 | VF | IF=100mA | -- | 1.35 | 1.5 | V |
| 逆電圧 | IR | VR=5V | -- | -- | 10 | μA |
| 放射強度 | IE | IF=50mA | 12 | 20 | -- | mW/sr |
| 光出力 | PO | IF=50mA | -- | 11 | -- | mW |
| 端子間容量 | CT | VR=0,f=1MHz | -- | 20 | -- | pF |
| ピーク発光波長 | λP | IF=50mA | -- | 950 | -- | nm |
| スペクトル半値幅 | Δλ | IF=50mA | -- | 50 | -- | nm |
| 半値角 | θ1/2 | IF=50mA | -- | ±23.5 | -- | ° |
波長特性(標準値) (IF=50mA,Ta=25℃)
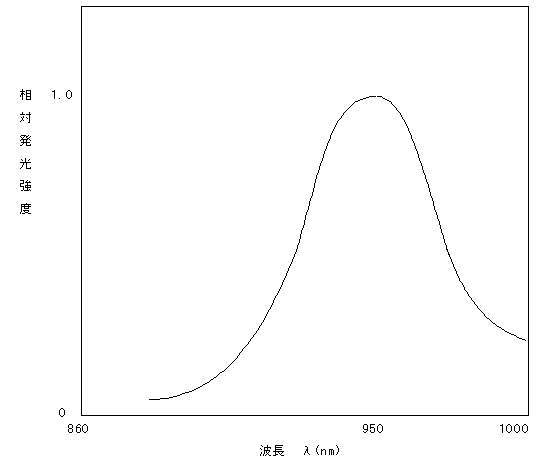
|
| 図1-7 波長特性 |
指向特性(標準値)
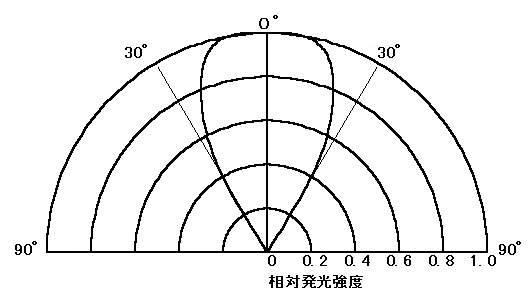
|
| 図1-8 指向特性 |
本ボードのコネクタのピンアサインについて述べる。
| No. | 信号名 | 方向 | 内容 |
| 1 | SWA | ← | Power Distrubutorへデータを送る。 |
| 2 | SWB | → | |
| 3 | Vsig | ← | 電源+5Vを入力。 |
| 4 | GND | -- |
←はボードへの入力、→はボードからの出力、--は方向が無いことをあらわす。
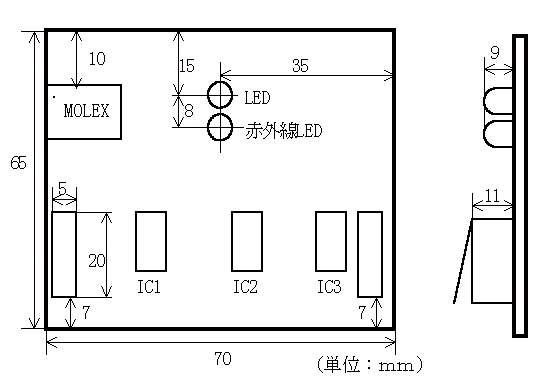
基板配置図を図1-11に示す。
|
| 図1-9 基板配置図(勝敗判定装置) |
コネクタの品名
MOLEX(5046-04A):9.5 × 13.3(mm)
可逆パワー変換ボードはDCサーボボードから送られてくるPWM信号を実際モータを駆動するアナログ信号に変換する。また、DCサーボボードから送られてくる方向信号によりモータにかける電圧の極性を変化させる。このときパワーコントロールボードから送られてくる7.2Vの電圧を6Vに落としてモータにかけている。可逆パワー変換ボードの詳細は川上研究室の卒論を参照。
POWER DISTRIBUTOR
| NO. | Item | Quantity | Reference |
| 1 | 3 | CN1,CN2,CN3 | MOLEX(53259-02) |
| 2 | 1 | CN4 | MOLEX(53259-04) |
| 3 | 1 | CN5 | MOLEX(5046-04) |
| 4 | 1 | CN6 | MOLEX(5046-03) |
| 5 | 1 | C1 | 334 (0.33μ):セキセラ |
| 6 | 1 | C2 | 47μ:デンカイ |
| 7 | 2 | C3,C4 | 10μ:デンカイ |
| 8 | 1 | SW1(D1) | UB-16SKP1R(ニッカイ) |
| 9 | 1 | SW2(D2) | UB-15SKP1M(ニッカイ) |
| 10 | 2 | D5,D4 | 10D-1 |
| 11 | 1 | IC1 | STR9005(サンケン) |
| 12 | 1 | RY1 | G2VN-237P |
| 13 | 1 | RY2 | G6B-1174P-US |
| 14 | 1 | R1 | 390 |
| 15 | 1 | R2 | 620 |
| 16 | 1 | R3 | 10K |
| 17 | 1 | U1 | SQ5-12D-250 |
| 18 | 1 | ホウネツバン | T220R41-25 |
| 19 | 8 | SPACER | 5mm |
| 20 | 4 | BOLT1 | M3*12 |
| 21 | 4 | BOLT2 | M2.6*15 |
| 22 | 4 | NUT | M3 |
| 23 | 1 | カンコウキバン(ガラスエポキシ) | 100mm*75mm |
SYOUHAIHANTEI SOUCHI
| NO. | Item | Quantity | Reference |
| 1 | 1 | CN1 | MOLEX(5046-04A) |
| 2 | 1 | C1 | 10μ |
| 3 | 1 | C2 | 104(0.1μ) :セキセラ |
| 4 | 5 | C3,C4,C5,C6,C7 | 103(0.01μ) :3,5,7;セキセラ、4,6;マイラ |
| 5 | 1 | D1 | TLN105B |
| 6 | 1 | D2 | LED |
| 7 | 2 | IC1,IC2 | μPD5555C |
| 8 | 1 | IC3 | SN75453B |
| 9 | 1 | R1 | 1.7K |
| 10 | 1 | R2 | 270 |
| 11 | 1 | R3 | 2.2K |
| 12 | 2 | R4,R5 | 30K |
| 13 | 1 | R6 | 390 |
| 14 | 2 | SW2 | SS-5GL |