PWM(Pulse Width Modulation)回路とは、周期は一定で、入力信号(DCレベル)の大きさに応じて、パルス幅のデュ-ティ・サイクル(パルス幅のHとLの比)を変え、モーターを制御する回路である。従来の制御にたいして、これは飽和(スイッチング)領域での制御となります。
従って、パワー・トランジスタを飽和領域で使用する為、電力ロスが軽減され、トランジスタもそれ程発熱しません。
更に必要な時間だけ通電しますので、モータ・ドライブ回路全体の効率があがり、電圧の負担も軽くなります。
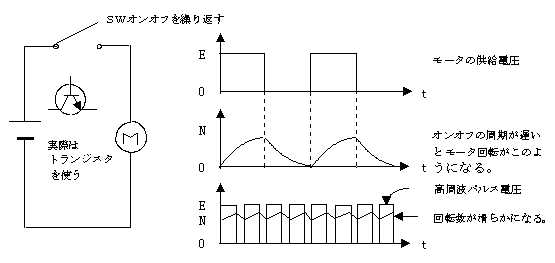
パルス制御法はモータのオンオフ制御をパルスによって行う方法である。これによりオフタイムでの電池の消耗が全くなくなる。またオンタイムでも制御トランジスタが完全に飽和しているので、ここでの電力ロスも最小限に抑えられ、トランジスタの電力ロスが著しく軽減される。
しかし、パルス駆動によるモータの振動音、ブラシ、コシュテータの著しい磨耗、それに電気ノイズの発生等のいろいろな問題を抱えている。下の図はパルス制御法の原理図である。
|
|
なおこの回路では、モータへのピーク電圧が電源電圧とほぼ同じになるが、この場合、オフタイムがあるのでその平均電力は低くなる。
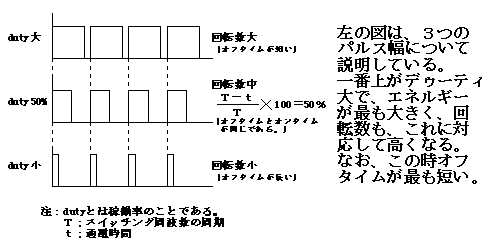
モータのPWM制御は、パルス制御法の発展形でありこの方式はオンパルスの通電幅を任意に変化させている。つまり、パルス幅を変調することによって結果的にモータへの供結エネルギーをコントロールしている。
反対に下側のデューテュ小は、回転数もそれに対応して低くなっているが、この時、オフタイムが最も長い。
また真ん中は、デューティ50%で、この時オンタイムオフタイム共に等しく、制御回路のちょうど中間を表わしている。
|
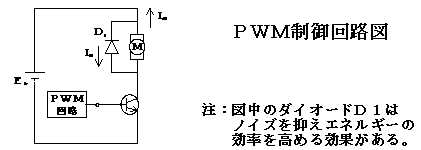
ところで、PWMを含めたパルス制御法は、電力パルスがオンの時だけモーター電流を流し、それ以外の時は休んでいるので、その間トランジスタや電流の負担が軽くなるのは良いが、汚点がない分けではない。これは、オフタイム中に起きてしまう事で、モータもコイルがある限り、そこには必ず何がしかのインダクタンスを有するので、これにオフ時の自己誘導作用が発生し、大きな逆起電力を誘発する。これは、制御用トランジスタを破壊するだけでなく、非常に大きな雑音を周囲に巻き散らし、ひいては大きな電磁波被害となる。
これを解決したのがダイオードD1で、一般にこれをフライホイールダイオードと呼んでいる。この働きは、モータオフ時にゆうはつする逆方向の電力をダイオードを介して同じモータに回生してやる事である。こうすることによって、高レベルの電気雑音が抑制されるだけでなく、そのエネルギーをオフタイム中、モータに流す事が出来るので、モータ電流が連続的となり、その結果エネルギー効率が上がり、なおかつモータの動きもスムーズになる。
|
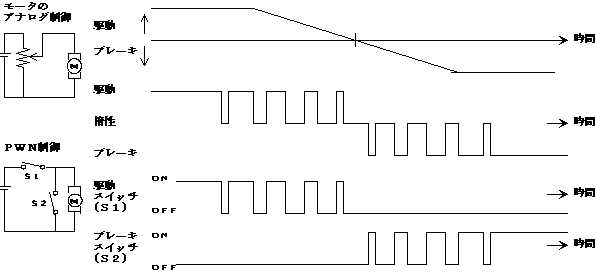
適当なパルスを発生し、そのパルスによりスイッチングを行って、モータの端子に電圧を印加したり、開放したりする。このときパルスのデューティ比変えることにより、等価的なアナログ制御を行なう方式をいう。
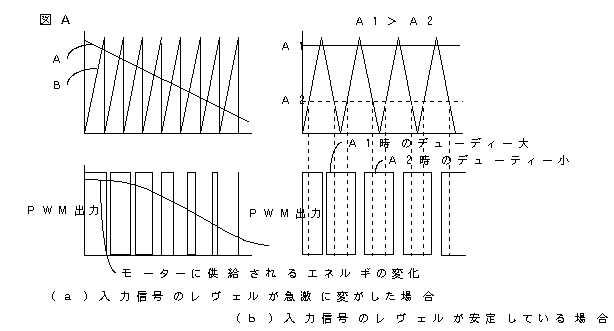
アナログ制御とPWM制御との違いを下の図に示す。
|
A図はPWM制御の波形を示したものである。図(a)は信号Aが急激に変化した場合の、電力変化のあるパルス列となる。
|
これより、モーターに供給されるエネルギ変化の様子が分かります。
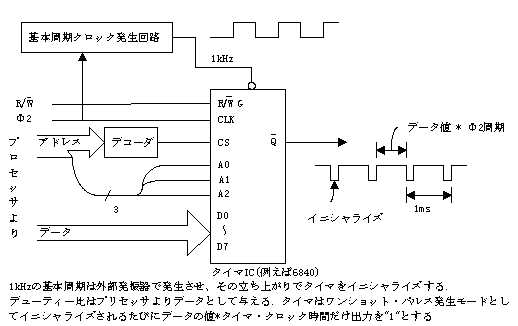
50Hz~4kHz程度の基本周期をもつパルス列を発生させデューティ比を制御するには、専用のハードウェアかタイマICを用いるのが簡単である。
|