1994年度
MIRS開発チーム第5班
システム詳細設計書
インターフェイス編
 ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ 改訂記録
 ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄
作成
久米 95・7・18 初版
溝口
全
21枚
目次
1.SFD(System Functional Diagram) 3
2.ソフトウェア/エレクトロニクス間インターフェイス仕様 3
3.ボード間インターフェイス仕様 12
4.ソフトウェア・モジュール間インターフェイス仕様 20
1.SFD
ファイル sfd1.sam を参照。
2.エレクトロニクス/ソフトウェア間インターフェイス仕様
1.マンマシンインターフェイス ポート割り当て
(1) コネクタ CN1:航空電子 PS-40SEN-D4P1-1C 40ピン
(2) ポートLSI名称:PI/T 68230
|
No. |
物理アドレス |
レジスタ名称 |
論理名 |
備考 |
|
1 |
fdfc01 |
ポートゼネラルコントロールレジスタ |
PGCR |
初期値 0x00 |
|
2 |
fdfc03 |
ポート処理要求レジスタ |
PSRR |
初期値 0x00 |
|
3 |
fdfc05 |
ポートAデータ方向レジスタ |
DDR1A |
初期値 0x00 |
|
4 |
fdfc07 |
ポートBデータ方向レジスタ |
DDR1B |
初期値 0x00 |
|
5 |
fdfc09 |
ポートCデータ方向レジスタ |
DDR1C |
初期値 0x00 |
|
6 |
fdfc0b |
ポート割り込みベクタレジスタ |
PIVR |
未使用 |
|
7 |
fdfc0d |
ポートAコントロールレジスタ |
CR1A |
初期値 0x00 |
|
8 |
fdfc0f |
ポートBコントロールレジスタ |
CR1B |
初期値 0x40 |
|
9 |
fdfc11 |
PI/TポートAデータレジスタ |
CN1A |
|
|
10 |
fdfc13 |
PI/TポートBデータレジスタ |
CN1B |
|
|
11 |
fdfc15 |
ポートAオルタネトレジスタ |
AR1A |
|
|
12 |
fdfc17 |
ポートBオルタネトレジスタ |
AR1B |
|
|
13 |
fdfc19 |
PI/TポートCデータレジスタ |
CN1C |
|
|
14 |
fdfc1b |
|||
|
15 |
fdfc1d |
ポートステータスレジスタ |
PSR |
未使用 |
|
16 |
fdfc1f |
( ポートインタラプトレジスタ) |
( PIVR) |
未使用 |
|
17 |
fdfc21 |
タイマーコントロールレジスタ |
TCR |
|
|
18 |
fdfc23 |
タイマー割り込みベクタレジスタ |
TIVR |
|
|
19 |
fdfc25 |
カウンタプリロードロングワードレジスタ |
CPRLW |
|
|
20 |
fdfc27 |
カウンタプリロードレジスタ上位 |
CPRH |
|
|
21 |
fdfc29 |
カウンタプリロードレジスタ中位 |
CPRM |
|
|
22 |
fdfc2b |
カウンタプリロードレジスタ下位 |
CPRL |
|
|
23 |
fdfc2d |
カウンタロングワードレジスタ |
CNTRLW |
|
|
24 |
fdfc2f |
カウンタレジスタ上位 |
CNTRH |
|
|
25 |
fdfc31 |
カウンタレジスタ中位 |
CNTRM |
|
|
26 |
fdfc33 |
カウンタレジスタ下位 |
CNTRL |
|
|
27 |
fdfc25 |
タイマーステータスレジスタ |
TSR |
未使用 |
ソフトウェアビジビリティ
PI/T ポートA
|
Address
|
Read or Write |
Data D7 D6 D5 D4 D3 D2 D1 D0 |
内容 |
|
FDFC11
|
________
Write
Write
Write
Write
________
Write
Write
Write
Write ________
Write ・ ・ ・ ・ Write
|
GD RD C1 C0 DA DB DC DD
_______________________________
0 0 * * * * * *
0 1 * * * * * *
1 0 * * * * * *
1 1 * * * * * *
_______________________________
* * 0 0 * * * *
* * 0 1 * * * *
* * 1 0 * * * *
* * 1 1 * * * * _______________________________
* * * * 0 0 0 0 ・ ・ ・ ・ * * * * 1 0 0 1 |
GD:Grren ダイオード選択RD:Red ダイオード選択C1:7SEG-LED 選択(上位)C0:7SEG-LED 選択(下位)DA:7SEG-LED Data 信号(A)DB:7SEG-LED Data 信号 (B)DC:7SEG-LED Data 信号 (C)DD:7SEG-LED Data 信号 (D)_________________________
Gren ダイオード消灯Red ダイオード消灯
Green ダイオード消灯Red ダイオード点灯
Green ダイオード点灯Red ダイオード消灯
Green ダイオード点灯Red ダイオード点灯_________________________
20 の7SEG-LEDを選択
21 の7SEG-LEDを選択
22 の7SEG-LEDを選択
23 の7SEG-LEDを選択_________________________
D5,D4 で選択した7SEG-LEDに0を表示させる。 ・ ・ ・ D5,D4 で選択した7SEG-LEDに9を表示させる。
|
Bポート
|
Address |
Read or Write |
Data D7 D6 D5 D4 D3 D2 D1 D0 |
内容 |
|
FDFC13 |
________
Read
Read ________
Read
Read ________
Read
Read ________
Write
Write ________
Read ・ ・ ・ Read |
PB SH TO TI S3 S2 S1 S0
________________________________
0 * * * * * * *
1 * * * * * * * ________________________________
* 0 * * * * * *
* 1 * * * * * * ________________________________
* * 0 * * * * *
* * 1 * * * * * ________________________________
* * * 0 * * * *
* * * 1 * * * * ________________________________
* * * * 0 0 0 0 ・ ・ ・ * * * * 1 1 1 1 |
PB: 押しボタンスイッチON/OFF信号SH: 勝敗判定装置ON/OFF信号TO: テスト信号出力TI: テスト信号入力S3:4bit スイッチON/OFF信号S2:4bit スイッチON/OFF信号S1:4bit スイッチON/OFF信号S0:4bit スイッチON/OFF信号__________________________
押しボタンスイッチOFF信号
押しボタンスイッチON信号 __________________________
勝敗判定装置ON信号
勝敗判定装置OFF信号 __________________________
テスト信号の出力OFF
テスト信号の出力ON __________________________
テスト信号の入力OFF
テスト信号の入力ON __________________________
4bit スイッチによって0000(0:10進)が入力 ・ ・ 4bit スイッチによって1111(15:10 進)が入力 |
(3) 物理仕様
CN1
|
ピン番号 |
信号名 |
方向 |
内容 |
ピン番号 |
信号名 |
方向 |
内容 |
|
1 |
Vcc |
← |
Vcc |
21 |
GND |
- |
GND |
|
2 |
H1 |
→ |
Handshake 1 |
22 |
PB0 |
→ |
4bitswitchON/OFF(0) |
|
3 |
TIN |
未使用 |
TIN |
23 |
GND |
- |
GND |
|
4 |
H2 |
← |
Handshake 2 |
24 |
PB1 |
→ |
4bitswitchON/OFF(1) |
|
5 |
TOUT |
← |
TOUT |
25 |
GND |
- |
GND |
|
6 |
PA0 |
← |
7Seg.-Led.data(0) |
26 |
PB2 |
→ |
4bitswitchON/OFF(2) |
|
7 |
GND |
- |
GND |
27 |
GND |
- |
GND |
|
8 |
PA1 |
← |
7Seg.-Led.data(1) |
28 |
PB3 |
→ |
4bitswitchON/OFF(3) |
|
9 |
GND |
- |
GND |
29 |
GND |
- |
GND |
|
10 |
PA2 |
← |
7Seg.-Led.data(2) |
30 |
PB4 |
← |
テスト信号入力 |
|
11 |
GND |
- |
GND |
31 |
GND |
- |
GND |
|
12 |
PA3 |
← |
7Seg.-Led.data(3) |
32 |
PB5 |
→ |
テスト信号出力 |
|
13 |
GND |
- |
GND |
33 |
GND |
- |
GND |
|
14 |
PA4 |
← |
7Seg.-Led.選択(下位) |
34 |
PB6 |
← |
勝敗判定装置ON/OFF信号 |
|
15 |
GND |
- |
GND |
35 |
GND |
- |
GND |
|
16 |
PA5 |
← |
7Seg.-Led.選択(上位) |
36 |
PB7 |
未使用 |
未使用 |
|
17 |
GND |
- |
GND |
37 |
GND |
- |
GND |
|
18 |
PA6 |
← |
Red-Led.ON/OFF |
38 |
H3 |
未使用 |
Handshake 3 |
|
19 |
GND |
- |
GND |
39 |
GND |
← |
GND |
|
20 |
PA7 |
← |
Green-Led.ON/OFF |
40 |
H4 |
→ |
Handshake 4 |
”←”CPUボードからメインボードへの入力
”→”メインボードからCPUボードへの出力を表す。
Handshake 1の信号は、Handshake 2の信号をインバータに通したものを出力する。
Handshake 2の信号は、デコーダのデータラッチのタイミング用である。
Handshake 4の信号は、押しボタンスイッチのON/OFF信号である。
(4)論理仕様 ソフトウェア編、論理仕様を参照。
2.I/Oボード(ロータリエンコーダボード) ポート割り当て
(1)使用コネクタ J3:AMP 173279-3
J5:AMP 173279-3
(2)ソフトウェアビジビリティ
|
Address A8A7A6A5A4A3A2A1A0 |
Read / Write |
DATA D7 D6 D5 D4 D3 D2 D1 D0 |
MEMO |
|
0 x x x x 0 0 0 1 |
Read |
2726252423222120 右ロータリ・エンコーダカウンタ下位 8ビット |
一定時間毎読む |
|
0 x x x x 0 0 1 1
|
Read |
SF L R M 2112102928右ロータリ・エンコーダカウンタ上位 4ビット+スイッチデータ |
SF: スイッチフラグ(SF=L・R・M,active high) L: 左スイッチ(active high)R: 右スイッチ(active high)M: 中央スイッチ(未使用) = "1"一定時間毎、スイッチ割込み時に読む |
|
0 x x x x 0 1 0 1 |
Read |
2726252423222120 左ロータリ・エンコーダカウンタ下位 8ビット |
一定時間毎読む |
|
0 x x x x 0 1 1 1 |
Read |
SF L R M 2112102928左ロータリ・エンコーダカウンタ上位 4ビット+スイッチデータ |
SF: スイッチフラグ(SF=L・R・M,active high) L: 左スイッチ(active high)R: 右スイッチ(active high)M: 中央スイッチ(未使用) = "1"一定時間毎、スイッチ割込み時に読む |
|
0 x x x x 1 0 0 1 |
Write |
( カウンタリセット)x x x x x x 0 1右ロータリ・エンコーダカウンタリセット x x x x x x 1 0左ロータリ・エンコーダカウンタリセット x x x x x x 1 1左右カウンタ同時リセット |
右カウンタ読み込み後に行う
左カウンタ読み込み後に行う
スタート時に行う |
|
0 x x x x 1 0 1 1 |
Write |
( 割込みenable)x x x x x x x 0割込み不可 x x x x x x x 1割込み許可 |
リセット後に行う |
※ アドレスA8より上位桁は、ジャンパ設定。
※ アドレスおよびデータの "x" は、don't care を意味する。
(3)物理仕様
J3
|
ピン番号 |
信号名 |
方向 |
機能 |
備考 |
|
1 |
GND |
-- |
GND |
|
|
2 |
CLK |
← |
Clock 8MHz |
|
|
3 |
BRESET* |
← |
CPU リセット信号 |
|
|
4 |
D00 |
←→ |
DATA 20 |
|
|
5 |
D01 |
←→ |
DATA 21 |
|
|
6 |
D02 |
←→ |
DATA 22 |
|
|
7 |
D03 |
←→ |
DATA 23 |
|
|
8 |
D04 |
←→ |
DATA 24 |
|
|
9 |
D05 |
←→ |
DATA 25 |
|
|
10 |
D06 |
←→ |
DATA 26 |
|
|
11 |
D07 |
←→ |
DATA 27 |
|
|
12 |
D08 |
←→ |
DATA 28 |
未使用 |
|
13 |
D09 |
←→ |
DATA 29 |
未使用 |
|
14 |
D10 |
←→ |
DATA 210 |
未使用 |
|
15 |
D11 |
←→ |
DATA 211 |
未使用 |
|
16 |
D12 |
←→ |
DATA 212 |
未使用 |
|
17 |
D13 |
←→ |
DATA 213 |
未使用 |
|
18 |
D14 |
←→ |
DATA 214 |
未使用 |
|
19 |
D15 |
←→ |
DATA 215 |
未使用 |
|
20 |
BS0* |
← |
Byte Select (下位バイト) |
BS0*=0 (active) |
|
21 |
BS1* |
← |
Byte Select (上位バイト) |
BS1*=1 (negative ) |
|
22 |
V- |
-- |
電源 -12V |
未使用 |
|
23 |
V+ |
-- |
電源 +12V |
未使用 |
|
24 |
Vcc |
-- |
電源 +5V |
|
|
25 |
GND |
-- |
GND |
|
|
26 |
GND |
-- |
GND |
|
|
27 |
Vcc |
-- |
電源 +5V |
|
|
28 |
PWR* |
← |
Read*Write Select |
1=Read ,0=Write |
|
29 |
IDA* |
← |
ID PROM Select 信号 |
|
|
30 |
H1 |
← |
high level 入力 |
|
|
31 |
MEMSELA* |
← |
Memory R*W Cycle 信号 |
未使用 |
|
32 |
H2 |
← |
high level 入力 |
|
|
33 |
INTSELA* |
← |
Interrupt Cycle 信号 |
|
|
34 |
H3 |
← |
high level 入力 |
|
|
35 |
IOSELA* |
← |
I/O Cycle 信号 |
|
|
36 |
H4 |
← |
high level 入力 |
|
|
37 |
ADDR1 |
← |
Address 21 |
|
|
38 |
H5 |
← |
high level 入力 |
|
|
39 |
ADDR2 |
← |
Address 22 |
|
|
40 |
H6 |
← |
high level 入力 |
|
|
41 |
ADDR3 |
← |
Address 23 |
|
|
42 |
IRQA0* |
→ |
Interrupt 信号 (割込み level=4) |
|
|
43 |
ADDR4 |
← |
Address 24 |
|
|
44 |
IRQA1* |
→ |
Interrupt 信号 (割込み level=5) |
未使用 |
|
45 |
ADDR5 |
← |
Address 25 |
|
|
46 |
H7 |
← |
high level 入力 |
|
|
47 |
ADDR6 |
← |
Address 26 |
|
|
48 |
ACKA* |
→ |
Acknowledge |
|
|
49 |
+5PSTBT |
-- |
VIPC310 ボードのバッテリー電源 |
データ保存用、未使用 |
|
50 |
GND |
-- |
GND |
※ 方向は、本ボードへの入力信号を "←"、本ボードからの出力信号を "→" とする。
また、 "←→" は双方向信号である。
※ 方向の " -- " は、方向を考慮する必要が無い(電源など)ことを表す。
※ 信号名の後ろの "*" は、その信号が active low 信号であることを示す。
J5
|
ピン番号 |
信号名 |
方向 |
機能 |
備考 |
|
1 |
GND |
-- |
GND |
|
|
2 |
GND |
-- |
GND |
|
|
3 |
GND |
-- |
GND |
|
|
4 |
GND |
-- |
GND |
|
|
5 |
GND |
-- |
GND |
|
|
6 |
GND |
-- |
GND |
|
|
7 |
GND |
-- |
GND |
|
|
8 |
GND |
-- |
GND |
|
|
9 |
GND |
-- |
GND |
|
|
10 |
GND |
-- |
GND |
|
|
11 |
GND |
-- |
GND |
|
|
12 |
GND |
-- |
GND |
|
|
13 |
GND |
-- |
GND |
|
|
14 |
GND |
-- |
GND |
|
|
15 |
GND |
-- |
GND |
|
|
16 |
GND |
-- |
GND |
|
|
17 |
GND |
-- |
GND |
|
|
18 |
GND |
-- |
GND |
|
|
19 |
GND |
-- |
GND |
|
|
20 |
GND |
-- |
GND |
|
|
21 |
GND |
-- |
GND |
|
|
22 |
GND |
-- |
GND |
|
|
23 |
GND |
-- |
GND |
|
|
24 |
GND |
-- |
GND |
|
|
25 |
GND |
-- |
GND |
|
|
26 |
GND |
-- |
GND |
|
|
27 |
RRa |
← |
右ロータリ・エンコーダa相信号 |
|
|
28 |
GND |
-- |
GND |
|
|
29 |
Vcc |
-- |
電源+5V |
|
|
30 |
GND |
-- |
GND |
|
|
31 |
RRb |
← |
右ロータリ・エンコーダb相信号 |
|
|
32 |
GND |
-- |
GND |
|
|
33 |
RLa |
← |
左ロータリ・エンコーダa相信号 |
|
|
34 |
GND |
-- |
GND |
|
|
35 |
Vcc |
-- |
電源+5V |
|
|
36 |
GND |
-- |
GND |
|
|
37 |
RLb |
← |
左ロータリ・エンコーダb相信号 |
|
|
38 |
GND |
-- |
GND |
|
|
39 |
TRs* |
← |
右タッチセンサON信号 |
※※ |
|
40 |
GND |
-- |
GND |
|
|
41 |
TRr* |
← |
右タッチセンサOFF信号 |
※※ |
|
42 |
GND |
-- |
GND |
|
|
43 |
TMs* |
← |
中央タッチセンサON信号 |
未使用 |
|
44 |
GND |
-- |
GND |
|
|
45 |
TMr* |
← |
中央タッチセンサOFF信号 |
未使用 |
|
46 |
GND |
-- |
GND |
|
|
47 |
TLs* |
← |
左タッチセンサON信号 |
※※ |
|
48 |
GND |
-- |
GND |
|
|
49 |
TLr* |
← |
左タッチセンサOFF信号 |
※※ |
|
50 |
GND |
-- |
GND |
※ 方向は、本ボードへの入力信号を "←" とする。
※ 信号名の後ろの'*'は、その信号が active low信号であることを示す。
(4)論理仕様 ソフトウェア編、論理仕様を参照。
3.I/Osubボード ポート割当表
(1)コネクタ
コネクタ番号 品名(品番号) ピンタイプ
CN1 PCN10シリーズDIN41612(準拠) VME-busコネクタ 96ピン
CN2 PS-50SEN-D4P1-1C(航空電子) 50ピン
(2)ソフトウェアビジビリティ
① 超音波センサ回路
(注:アドレスのXXはジャンパーによる設定)
|
割り当てられたアドレス |
設定 |
R/W |
内容 |
|
FCXX41 |
00X1**00 |
W |
モード0に設定 |
|
FCXX47 |
01111011 |
W |
サブモード01に設定 |
|
FCXX51 |
XX X XX |
W R R |
センサ選択信号 アンダーフローデータ 折返しセンサ選択信号 |
|
FCXX45 |
00000011 |
W |
方向を設定 (6、7ビット目を出力) |
|
FCXX61 |
1X11001changed |
W |
カウンタを設定 |
|
FCXX67、69、6B |
W |
3バイトでカウンタの設定値 |
|
|
FCXX6F、71、73 |
R |
カウンタ値 |
FCXX47を設定するときはFCXX41を全て0にしてから行う事
* は赤外線センサボードを参照
② PWM回路
|
ADDRESS A7A6A5A4A3A2A1A0 |
DATA D7D6D5D4D3D2D1D0 |
READ/WRITE |
FUNCTION |
REGISTER |
|
00000001 |
00000000 |
W |
portをモード0に設定 |
PGCR |
|
00001101 |
1×0××000 |
W |
portAをサブモード1×に設定 |
CR1A |
|
00001111 |
1×0××000 |
W |
portBをサブモーデ1×に設定 |
CR1B |
|
00000101 |
11111111 |
W |
portAの全てのピンを出力に設定 |
DDR1A |
|
00000111 |
11111111 |
W |
portBの全てのピンを出力に設定 |
DDR1B |
|
00100111 |
00000000 |
W |
Toutの出力周波数が、200[kHz]になるように設定 |
CPRH |
|
00101001 |
00000000 |
W |
CPRM |
|
|
00101011 |
00010100 |
W |
CPRL |
|
|
00100001 |
01×00001 |
W |
TimerをSquare Wave Generatorに設定 |
TCR |
|
00010001 |
D7は方向、D6~ D0速度データ |
W |
portAに速度・方向データを出力 |
CN1A |
|
00010011 |
W |
portBに速度・方向データを出力 |
CN1B |
|
|
00011001 |
R |
portC(D0D1)から方向データを読む。 |
CN1C |
|
A23~A16は全て11111100、A15~A9は、jumperによって決定する。A8は1である。
③ 赤外線センサ回路
|
割り当てられたアドレス |
DATA |
R/W |
機能 |
|
FCXX41 |
0 0 1 1 1 1 1 0 |
W |
ポートモードを0に設定 |
|
FCXX47 |
1 1 1 1 1 1 1 1 |
W |
ポートBの方向を出力に設定 |
|
FCXX4F |
0 0 1 1 0 0 1 × |
W |
ハンドシェイクピンとサブモードの設定 |
|
FCXX57 |
赤外線信号の状態 |
R |
ポートBのデータの読みだし |
ハンドシェイクピンとサブモードの設定について
H3を割り込み可能で出力、インターロック方式のハンドシェイク・プロトコルにしサブモードを00にした。
(3)物理仕様
CN2
|
No. |
信号名 |
方向 |
機能 |
No. |
信号名 |
方向 |
機能 |
|
1 |
GND |
26 |
GND |
||||
|
2 |
H4 |
→ |
割込み認可信号 |
27 |
PC 7 |
未使用 |
|
|
3 |
PC3/TOUT |
← |
アンダフロー信号 |
28 |
PC 3/Tout |
→ |
カウンタのCLK |
|
4 |
H3 |
← |
割込み要求信号 |
29 |
PC 5 |
未使用 |
|
|
5 |
PC2/TIN |
→ |
超音波カウンタスタート |
30 |
PC 2/Tin |
未使用 |
|
|
6 |
H2 |
超音波送信トリガ |
31 |
PC 5 |
未使用 |
||
|
7 |
GND |
32 |
PC 1 |
← |
左PWM方向データ(T) |
||
|
8 |
H1 |
超音波割込要求信号 |
33 |
PC 4 |
未使用 |
||
|
9 |
GND |
34 |
PC 0 |
← |
右PWM方向データ(T) |
||
|
10 |
PB7 |
← |
赤外線信号 |
35 |
PB 7 |
→ |
左速度データ26ビット |
|
11 |
PB6 |
← |
赤外線信号 |
36 |
PB 6 |
→ |
左速度データ25ビット |
|
12 |
PB5 |
← |
赤外線信号 |
37 |
PB 5 |
→ |
左速度データ24ビット |
|
13 |
PB4 |
← |
赤外線信号 |
38 |
PB 4 |
→ |
左速度データ23ビット |
|
14 |
PB3 |
← |
赤外線信号 |
39 |
PB 3 |
→ |
左速度データ22ビット |
|
15 |
PB2 |
← |
赤外線信号 |
40 |
PB 2 |
→ |
左速度データ21ビット |
|
16 |
PB1 |
← |
赤外線信号 |
41 |
PB 1 |
→ |
左速度データ20ビット |
|
17 |
PB0 |
← |
赤外線信号 |
42 |
PB 0 |
→ |
左PWM方向データ |
|
18 |
PA7 |
→ |
未使用 |
43 |
PA 7 |
→ |
右速度データ26ビット |
|
19 |
PA6 |
→ |
未使用 |
44 |
PA 6 |
→ |
右速度データ25ビット |
|
20 |
PA5 |
→ |
センサ選択信号(T) |
45 |
PA 5 |
→ |
右速度データ24ビット |
|
21 |
PA4 |
→ |
センサ選択信号(T) |
46 |
PA 4 |
→ |
右速度データ23ビット |
|
22 |
PA3 |
→ |
未使用 |
47 |
PA 3 |
→ |
右速度データ22ビット |
|
23 |
PA2 |
→ |
アンダフロー信号 |
48 |
PA 2 |
→ |
右速度データ21ビット |
|
24 |
PA1 |
← |
超音波センサ選択信号 |
49 |
PA 1 |
→ |
右速度データ20ビット |
|
25 |
PA0 |
← |
超音波センサ選択信号 |
50 |
PA 0 |
→ |
右PWM方向データ |
T)は、ITP用テストピンである。
I/Oボードから本ボードへの方向は”→”で表す。
(4)論理仕様 ソフトウェア編、論理仕様を参照。
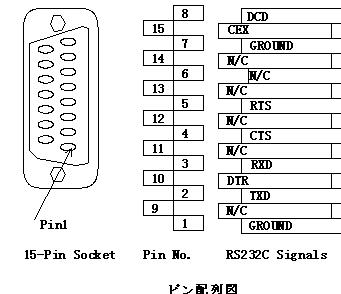
4.RS-232Cインターフェイス
我々のMIRSではMPUボード(VSBC-1)のシリアルI/O Piggyback module が利用できる。これに15pinのコネクタで接続することができる。以下にRS232Cシリアルインターフェイスの仕様、及びピン配列、I/Oレジスタを示す。
仕様表
|
Parameter |
Range |
Notes |
|
Transfer rate |
76.8Kbaud |
|
|
Maximum Cable Length |
20meter |
|
|
Outoput Level |
±12V max |
True RS232C levels |
I/Oレジスタ
|
DUSCC アドレス |
レジスタ |
|
FDFCB7 |
DUSCCチャンネルAゼネラルステータスレジスタ |
|
FDFCBF |
DUSCCチャンネルAインターラプトコントロールレジスタ |
※ 詳細は VSBCー1 Users Manual 参照
3.ボード間インターフェイス編
★CPUボード
40ピンパラレルポート:航空電子 PS-40SEN-D4P1-1C
MMIメインボード(CN1) ⇔ CPUボード(パラレルポート)
|
ピン番号 |
信号名 |
方向 |
内容 |
ピン番号 |
信号名 |
方向 |
内容 |
|
1 |
Vcc |
← |
Vcc |
21 |
GND |
- |
GND |
|
2 |
H1 |
→ |
Handshake 1 |
22 |
PB0 |
→ |
4bitswitchON/OFF(0) |
|
3 |
TIN |
未使用 |
TIN |
23 |
GND |
- |
GND |
|
4 |
H2 |
← |
Handshake 2 |
24 |
PB1 |
→ |
4bitswitchON/OFF(1) |
|
5 |
TOUT |
← |
TOUT |
25 |
GND |
- |
GND |
|
6 |
PA0 |
← |
7Seg.-Led.data(0) |
26 |
PB2 |
→ |
4bitswitchON/OFF(2) |
|
7 |
GND |
- |
GND |
27 |
GND |
- |
GND |
|
8 |
PA1 |
← |
7Seg.-Led.data(1) |
28 |
PB3 |
→ |
4bitswitchON/OFF(3) |
|
9 |
GND |
- |
GND |
29 |
GND |
- |
GND |
|
10 |
PA2 |
← |
7Seg.-Led.data(2) |
30 |
PB4 |
← |
テスト信号入力 |
|
11 |
GND |
- |
GND |
31 |
GND |
- |
GND |
|
12 |
PA3 |
← |
7Seg.-Led.data(3) |
32 |
PB5 |
→ |
テスト信号出力 |
|
13 |
GND |
- |
GND |
33 |
GND |
- |
GND |
|
14 |
PA4 |
← |
7Seg.-Led.選択(下位) |
34 |
PB6 |
← |
勝敗判定装置ON/OFF信号 |
|
15 |
GND |
- |
GND |
35 |
GND |
- |
GND |
|
16 |
PA5 |
← |
7Seg.-Led.選択(上位) |
36 |
PB7 |
未使用 |
未使用 |
|
17 |
GND |
- |
GND |
37 |
GND |
- |
GND |
|
18 |
PA6 |
← |
Red-Led.ON/OFF |
38 |
H3 |
未使用 |
Handshake 3 |
|
19 |
GND |
- |
GND |
39 |
Vcc |
← |
Vcc |
|
20 |
PA7 |
← |
Green-Led.ON/OFF |
40 |
H4 |
→ |
Handshake 4 |
CPUボードからMMIボードへの信号を”←”で表わす。
★MMIボード
CN1:航空電子 PS-40SEN-D4P1-1C
CPUボード(パラレルポート) ⇔ MMIメインボード(CN1)
|
ピン番号 |
信号名 |
方向 |
内容 |
ピン番号 |
信号名 |
方向 |
内容 |
|
1 |
Vcc |
← |
Vcc |
21 |
GND |
- |
GND |
|
2 |
H1 |
→ |
Handshake 1 |
22 |
PB0 |
→ |
4bitswitchON/OFF(0) |
|
3 |
TIN |
未使用 |
TIN |
23 |
GND |
- |
GND |
|
4 |
H2 |
← |
Handshake 2 |
24 |
PB1 |
→ |
4bitswitchON/OFF(1) |
|
5 |
TOUT |
← |
TOUT |
25 |
GND |
- |
GND |
|
6 |
PA0 |
← |
7Seg.-Led.data(0) |
26 |
PB2 |
→ |
4bitswitchON/OFF(2) |
|
7 |
GND |
- |
GND |
27 |
GND |
- |
GND |
|
8 |
PA1 |
← |
7Seg.-Led.data(1) |
28 |
PB3 |
→ |
4bitswitchON/OFF(3) |
|
9 |
GND |
- |
GND |
29 |
GND |
- |
GND |
|
10 |
PA2 |
← |
7Seg.-Led.data(2) |
30 |
PB4 |
← |
テスト信号入力 |
|
11 |
GND |
- |
GND |
31 |
GND |
- |
GND |
|
12 |
PA3 |
← |
7Seg.-Led.data(3) |
32 |
PB5 |
→ |
テスト信号出力 |
|
13 |
GND |
- |
GND |
33 |
GND |
- |
GND |
|
14 |
PA4 |
← |
7Seg.-Led.選択(下位) |
34 |
PB6 |
← |
勝敗判定装置ON/OFF信号 |
|
15 |
GND |
- |
GND |
35 |
GND |
- |
GND |
|
16 |
PA5 |
← |
7Seg.-Led.選択(上位) |
36 |
PB7 |
未使用 |
未使用 |
|
17 |
GND |
- |
GND |
37 |
GND |
- |
GND |
|
18 |
PA6 |
← |
Red-Led.ON/OFF |
38 |
H3 |
未使用 |
Handshake 3 |
|
19 |
GND |
- |
GND |
39 |
Vcc |
← |
Vcc |
|
20 |
PA7 |
← |
Green-Led.ON/OFF |
40 |
H4 |
→ |
Handshake 4 |
”←”CPUボードからメインボードへの入力
”→”メインボードからCPUボードへの出力を表す。
Handshake 1の信号は、Handshake 2の信号をインバータに通したものを出力する。
Handshake 2の信号は、デコーダのデータラッチのタイミング用である。
Handshake 4の信号は、押しボタンスイッチのON/OFF信号である。
CN3及びCN4 :PS-60SEN-D4P1-1C 60ピンコネクタ
MMIメイン(CN3) ⇔ MMIフロント(CN4)
|
番号 |
信号名 |
方向※ |
内容 |
番号 |
信号名 |
方向※ |
内容 |
|
1 |
-- |
未使用 |
未使用 |
31 |
-- |
未使用 |
未使用 |
|
2 |
-- |
未使用 |
未使用 |
32 |
-- |
未使用 |
未使用 |
|
3 |
-- |
未使用 |
未使用 |
33 |
GND |
- |
GND |
|
4 |
PS1 |
← |
押しボタンスイッチON/OFF信号 |
34 |
7SG1A |
→ |
7Seg.-Led.1信号(a) |
|
5 |
PS2 |
← |
押しボタンスイッチON/OFF信号 |
35 |
7SG1G |
→ |
7Seg.-Led.1信号(g) |
|
6 |
GND |
- |
GND |
36 |
7SG1F |
→ |
7Seg.-Led.1信号(f) |
|
7 |
-- |
未使用 |
未使用 |
37 |
7SG1B |
→ |
7Seg.-Led.1信号(b) |
|
8 |
-- |
未使用 |
未使用 |
38 |
7SG1C |
→ |
7Seg.-Led.1信号(c) |
|
9 |
PCN3 |
← |
3ピンコネクタ(3) |
39 |
7SG1D |
→ |
7Seg.-Led.1信号(d) |
|
10 |
PCN2 |
← |
3ピンコネクタ(2) |
40 |
7SG1E |
→ |
7Seg.-Led.1信号(e) |
|
11 |
-- |
未使用 |
未使用 |
41 |
-- |
未使用 |
未使用 |
|
12 |
GND |
- |
GND |
42 |
-- |
未使用 |
未使用 |
|
13 |
4DS3 |
← |
4ビットディップスイッチON/OFF(3) |
43 |
GND |
- |
GND |
|
14 |
4DS2 |
← |
4ビットディップスイッチON/OFF(2) |
44 |
7SG2A |
→ |
7Seg.-Led.2信号(a) |
|
15 |
4DS1 |
← |
4ビットディップスイッチON/OFF(1) |
45 |
7SG2G |
→ |
7Seg.-Led.2信号(g) |
|
16 |
4DS0 |
← |
4ビットディップスイッチON/OFF(0) |
46 |
7SG2F |
→ |
7Seg.-Led.2信号(f) |
|
17 |
Vcc |
- |
Vcc |
47 |
7SG2B |
→ |
7Seg.-Led.2信号(b) |
|
18 |
GLED |
→ |
Green-Led.ON/OFF信号 |
48 |
7SG2C |
→ |
7Seg.-Led.2信号(c) |
|
19 |
Vcc |
- |
Vcc |
49 |
7SG2D |
→ |
7Seg.-Led.2信号(d) |
|
20 |
RLED |
→ |
Red-Led.ON/OFF信号 |
50 |
7SG2E |
→ |
7Seg.-Led.2信号(e) |
|
21 |
-- |
未使用 |
未使用 |
51 |
-- |
未使用 |
未使用 |
|
22 |
-- |
未使用 |
未使用 |
52 |
-- |
未使用 |
未使用 |
|
23 |
GND |
- |
GND |
53 |
GND |
- |
GND |
|
24 |
7SG0A |
→ |
7Seg.-Led. 0信号(a) |
54 |
7SG3A |
→ |
7Seg.-Led.3信号(a) |
|
25 |
7SG0G |
→ |
7Seg.-Led. 0信号(g) |
55 |
7SG3G |
→ |
7Seg.-Led.3信号(g) |
|
26 |
7SG0F |
→ |
7Seg.-Led. 0信号(f) |
56 |
7SG3F |
→ |
7Seg.-Led.3信号(f) |
|
27 |
7SG0B |
→ |
7Seg.-Led. 0信号(b) |
57 |
7SG3B |
→ |
7Seg.-Led.3信号(b) |
|
28 |
7SG0C |
→ |
7Seg.-Led. 0信号(c) |
58 |
7SG3C |
→ |
7Seg.-Led.3信号(c) |
|
29 |
7SG0D |
→ |
7Seg.-Led. 0信号(d) |
59 |
7SG3D |
→ |
7Seg.-Led.3信号(d) |
|
30 |
7SG0E |
→ |
7Seg.-Led. 0信号(e) |
60 |
7SG3E |
→ |
7Seg.-Led.3信号(e) |
方向は、”←”フロントボードからメインボードへの入力
”→”メインボードからフロントボードへの出力を表す。
CN2: 5102-03 3ピンコネクタ
PDボード(CN6) ⇔ MMIフロント(CN2)
|
Pin番号 |
信号名 |
方向 |
内容 |
|
1 |
-- |
未使用 |
未使用 |
|
2 |
Vsig |
MMIへ |
Vsig(スタートから勝敗判定SWが押されるまで +5Vが出力される。) |
|
3 |
GND |
勝敗判定装置へ |
GND |
★I/Oボード
CN JA:AMP 173279-3
ロータリエンコーダボード(JA) ⇔ ロータリエンコーダ・タッチセンサ
|
ピン番号 |
信号名 |
方向 |
機能 |
備考 |
|
1 |
GND |
-- |
GND |
|
|
2 |
GND |
-- |
GND |
|
|
3 |
GND |
-- |
GND |
|
|
4 |
GND |
-- |
GND |
|
|
5 |
GND |
-- |
GND |
|
|
6 |
GND |
-- |
GND |
|
|
7 |
GND |
-- |
GND |
|
|
8 |
GND |
-- |
GND |
|
|
9 |
GND |
-- |
GND |
|
|
10 |
GND |
-- |
GND |
|
|
11 |
GND |
-- |
GND |
|
|
12 |
GND |
-- |
GND |
|
|
13 |
GND |
-- |
GND |
|
|
14 |
GND |
-- |
GND |
|
|
15 |
GND |
-- |
GND |
|
|
16 |
GND |
-- |
GND |
|
|
17 |
GND |
-- |
GND |
|
|
18 |
GND |
-- |
GND |
|
|
19 |
GND |
-- |
GND |
|
|
20 |
GND |
-- |
GND |
|
|
21 |
GND |
-- |
GND |
|
|
22 |
GND |
-- |
GND |
|
|
23 |
GND |
-- |
GND |
|
|
24 |
GND |
-- |
GND |
|
|
25 |
GND |
-- |
GND |
|
|
26 |
GND |
-- |
GND |
|
|
27 |
RRa |
← |
右ロータリ・エンコーダa相信号 |
|
|
28 |
GND |
-- |
GND |
|
|
29 |
Vcc |
-- |
電源+5V |
|
|
30 |
GND |
-- |
GND |
|
|
31 |
RRb |
← |
右ロータリ・エンコーダb相信号 |
|
|
32 |
GND |
-- |
GND |
|
|
33 |
RLa |
← |
左ロータリ・エンコーダa相信号 |
|
|
34 |
GND |
-- |
GND |
|
|
35 |
Vcc |
-- |
電源+5V |
|
|
36 |
GND |
-- |
GND |
|
|
37 |
RLb |
← |
左ロータリ・エンコーダb相信号 |
|
|
38 |
GND |
-- |
GND |
|
|
39 |
TRs* |
← |
右タッチセンサON信号 |
※※ |
|
40 |
GND |
-- |
GND |
|
|
41 |
TRr* |
← |
右タッチセンサOFF信号 |
※※ |
|
42 |
GND |
-- |
GND |
|
|
43 |
TMs* |
← |
中央タッチセンサON信号 |
未使用 |
|
44 |
GND |
-- |
GND |
|
|
45 |
TMr* |
← |
中央タッチセンサOFF信号 |
未使用 |
|
46 |
GND |
-- |
GND |
|
|
47 |
TLs* |
← |
左タッチセンサON信号 |
※※ |
|
48 |
GND |
-- |
GND |
|
|
49 |
TLr* |
← |
左タッチセンサOFF信号 |
※※ |
|
50 |
GND |
-- |
GND |
I/Oボードからロータリエンコーダ、タッチセンサへの方向を”→”とする。
** は、active low を表わす。
★I/Osubボード
☆超音波センサ回路 CN3:PS-16SEN-D4P1-1C 16ピンコネクタ
超音波センサ送受信部(CN4) ⇔ I/Osub(超音波センサ回路)(CN3)
|
No. |
信号名 |
方向 |
内容 |
|
1 |
vcc |
→ |
vcc |
|
2 |
S10 |
→ |
送信信号 |
|
3 |
S11 |
← |
受信信号 |
|
4 |
GND |
GND |
|
|
5 |
vcc |
→ |
vcc |
|
6 |
S20 |
→ |
送信信号 |
|
7 |
S21 |
← |
受信信号 |
|
8 |
GND |
GND |
|
|
9 |
vcc |
→ |
vcc |
|
10 |
S30 |
→ |
送信信号 |
|
11 |
S31 |
← |
受信信号 |
|
12 |
GND |
GND |
|
|
13 |
vcc |
→ |
vcc |
|
14 |
S40 |
→ |
送信信号 |
|
15 |
S41 |
← |
受信信号 |
|
16 |
GND |
GND |
I/Osubボードから送受信部への信号を”→”と表わす。
☆赤外線センサ回路 CN4:PS-16SEN-D4P1-1C 16ピンコネクタ
赤外線周辺回路(CN1)×4 ⇔ I/Osub(赤外線センサ回路)(CN4)
|
NO. |
信号名 |
方向 |
内容 |
|
1 |
I1 |
← |
赤外線信号 |
|
2 |
Vcc |
→ |
Vcc |
|
3 |
I2 |
← |
赤外線信号 |
|
4 |
GND |
→ |
GND |
|
5 |
I3 |
← |
赤外線信号 |
|
6 |
Vcc |
→ |
Vcc |
|
7 |
I4 |
← |
赤外線信号 |
|
8 |
GND |
→ |
GND |
|
9 |
I5 |
← |
赤外線信号 |
|
10 |
Vcc |
→ |
Vcc |
|
11 |
I6 |
← |
赤外線信号 |
|
12 |
GND |
→ |
GND |
|
13 |
I7 |
← |
赤外線信号 |
|
14 |
Vcc |
→ |
Vcc |
|
15 |
I8 |
← |
赤外線信号 |
|
16 |
GND |
→ |
GND |
赤外線センサ信号処理回路から周辺回路への方向を”→”とする。
☆PWM回路
CN5:5102-05 5ピンコネクタ
MPC(CN1) ⇔ I/Osub(PWM回路)(CN5)
|
No. |
信号名 |
方向 |
内容 |
|
1 |
VCC |
|
VCC |
|
2 |
S0 |
→ |
右方向信号 |
|
3 |
S1 |
→ |
右PWM信号 |
|
4 |
S2 |
→ |
左方向信号 |
|
5 |
S3 |
→ |
左PWM信号 |
PWM回路からMPCへの方向を"→"とする。
★赤外線周辺回路
CN1: PS-16SEN-D4P1-1C 16ピンコネクタ
I/Osub(赤外線センサ回路)(CN4) ⇔ 赤外線周辺回路(CN1)
|
No. |
信号名 |
方向 |
内容 |
|
1 |
Ii |
← |
赤外線信号 |
|
2 |
Vcc |
→ |
|
|
3 |
Ii+1 |
← |
赤外線信号 |
|
4 |
GND |
→ |
I/Osubボードから赤外線周辺回路への方向を”→”とする。
CN2,CN3: 5102-03 3ピンコネクタ
赤外線周辺回路(CN2,3) ⇔ 受光素子部(CN1)
|
No. |
信号名 |
方向 |
内容 |
|
1 |
Ii |
← |
赤外線信号(変調前) |
|
2 |
GND |
→ |
|
|
3 |
Vcc |
→ |
赤外線周辺回路から赤外線受光素子部への方向を”→”とする。
★赤外線受光素子
CN1:5102-03 3ピンコネクタ
受光素子部(CN1) ⇔ 赤外線周辺回路(CN2,3)
|
No. |
信号名 |
方向 |
内容 |
|
1 |
Ii |
← |
赤外線信号(変調前) |
|
2 |
GND |
→ |
|
|
3 |
Vcc |
→ |
赤外線周辺回路から赤外線受光素子部への方向を”→”とする。
★超音波センサ送受信部
CN1:5102-04 4ピンコネクタ
超音波センサ送受信部(CN4) ⇔ I/O SUB(SSW)(CN3)
|
No. |
信号名 |
方向 |
内容 |
|
1 |
vcc |
→ |
vcc |
|
2 |
S*0 |
→ |
送信信号 |
|
3 |
S*1 |
← |
受信信号 |
|
4 |
GND |
-- |
GND |
I/O SUBから本ボードへの信号を”→”と表す。
★タッチセンサ
CN1:5102-03 3ピンコネクタ
REボード(JA) ⇔ タッチセンサ
|
No. |
信号名 |
方向 |
内容 |
|
1 |
TRs |
→ |
右タッチセンサON信号 ACTIVE LOW |
|
2 |
GND |
-- |
GND |
|
3 |
TRr |
→ |
右タッチセンサOFF信号 ACTIVE LOW |
|
No. |
信号名 |
方向 |
内容 |
|
1 |
TLs |
→ |
左タッチセンサON信号 ACTIVE LOW |
|
2 |
GND |
-- |
GND |
|
3 |
TLr |
→ |
左タッチセンサOFF信号 ACTIVE LOW |
←はボードへの入力、→はボードからの出力を表す。
★PDボード
CN1
,3:51067-0200 2ピンコネクタバッテリ ⇔ PDボード(CN1,3)
|
No. |
信号名 |
方向 |
内容 |
|
1 |
Vin |
← |
+7.2Vの電源(バッテリー)を入力する。 |
|
2 |
GND |
-- |
CN2:51067-0200 2ピンコネクタ
MPC(CN2) ⇔ PDボード(CN2)
|
No. |
信号名 |
方向 |
内容 |
|
1 |
Vout |
→ |
+7.2Vの電圧を持つ電力(モータ用)を供給する。 |
|
2 |
GND |
-- |
CN4:51067-0400 4ピンコネクタ
各ボード ⇔ PDボード(CN4)
|
No. |
信号名 |
方向 |
内容 |
|
|
1 |
V+ |
→ |
+12Vを出力 |
MPU,センサ系のボードの電源となる。 |
|
2 |
GND |
-- |
GND |
|
|
3 |
Vcc |
→ |
+5Vを出力 |
|
|
4 |
V- |
→ |
-12Vを出力 |
|
CN5:5102-04 4ピンコネクタ
勝敗判定装置(CN1) ⇔ PDボード(CN5)
|
No. |
信号名 |
方向 |
内容 |
|
1 |
SWA |
→ |
勝敗判定装置からのデータを得る。 |
|
2 |
SWB |
← |
|
|
3 |
Vsig |
→ |
スタートから勝敗判定SWを押されるまで+5Vを出力。 |
|
4 |
GND |
-- |
CN6:5102-03 3ピンコネクタ
MMIフロント(CN2) ⇔ PDボード(CN6)
|
No. |
信号名 |
方向 |
内容 |
|
1 |
OPEN |
-- |
信号なし |
|
2 |
Vsig |
→ |
スタートから勝敗判定SWを押されるまで+5Vを出力。 |
|
3 |
GND |
-- |
←はボードへの入力、→はボードからの出力を表す。
★勝敗判定装置 :
5102-04 4ピンコネクタPDボード
(CN5) ⇔ 勝敗判定装置(CN1)|
NO. |
信号名 |
方向 |
内容 |
|
1 |
SWA |
← |
勝敗判定装置からの信号を送る。 |
|
2 |
SWB |
→ |
|
|
3 |
Vsig |
← |
スタートスイッチが押されてから、勝敗判定スイッチが押されるまで、電力が供給される。 |
|
4 |
GND |
-- |
←はボードへの入力、→はボードからの出力を表す。
★ロータリエンコーダ :5102-05 5ピンコネクタ
右:RE(R) ⇔ REボード(JA)
|
NO. |
信号名 |
方向 |
内容 |
|
1 |
RRa |
→ |
右ロータリエンコーダ A相信号 |
|
2 |
GND |
-- |
GND |
|
3 |
Vcc |
← |
Vcc |
|
4 |
GND |
-- |
GND |
|
5 |
RRb |
→ |
右ロータリエンコーダ B相信号 |
左:RE(L) ⇔ REボード(JA)
|
NO. |
信号名 |
方向 |
内容 |
|
1 |
RLa |
→ |
左ロータリエンコーダ A相信号 |
|
2 |
GND |
-- |
GND |
|
3 |
Vcc |
← |
Vcc |
|
4 |
GND |
-- |
GND |
|
5 |
RLb |
→ |
左ロータリエンコーダ B相信号 |
←はボードへの入力、→はボードからの出力を表す。
★MPC
CN1:5102-05 5ピンコネクタ
I/Osub(PWM回路)(CN5) ⇔ MPC(CN1)
|
No. |
ピン名称 |
方向 |
信号 |
|
1 |
Vcc |
|
VCC |
|
2 |
S0 |
→ |
右方向信号 |
|
3 |
S1 |
→ |
右PWM信号 |
|
4 |
S2 |
→ |
左方向信号 |
|
5 |
S3 |
→ |
左PWM信号 |
CN2:51067-0220 2ピンコネクタ
PDボード(CN2) ⇔ MPC(CN2)
|
No. |
信号名 |
方向 |
内容 |
|
1 |
Vout |
→ |
+7.2Vの電圧を持つ電力(モータ用)を供給する。 |
|
2 |
GND |
-- |
CN3:51067-0200 2ピンコネクタ
右モーター ⇔ MPC(CN3)
|
No. |
信号名 |
方向 |
内容 |
|
1 |
Vout |
→ |
+7.2Vの電圧を持つ電力(モータ用)を供給する。 |
|
2 |
GND |
-- |
CN4:51067-0200 2ピンコネクタ
左モーター ⇔ MPC(CN4)
|
No. |
信号名 |
方向 |
内容 |
|
1 |
Vout |
→ |
+7.2Vの電圧を持つ電力(モータ用)を供給する。 |
|
2 |
GND |
-- |
ボードへの入力を”→”、出力を”←”とする。
4.ソフトウェア・モジュール間インターフェイス
|
信号名 |
シンボル |
サイズ |
入力モジュール名 |
No. |
出力モジュール名 |
No. |
|
ロータリエンコーダ距離データ |
re_dist |
1byte |
ロータリエンコーダ計測作成モジュール |
2-1 |
||
|
ロータリエンコーダ計測データ右 |
re_r |
1byte |
自己位置・姿勢演算モジュール |
2-3
|
ロータリエンコーダ計測データ作成モジュール |
2-1 |
|
ロータリエンコーダ計測データ左 |
re_l |
1byte |
自己位置・姿勢演算モジュール |
2-3 |
ロータリエンコーダ計測データ作成モジュール |
2-1 |
|
ロータリエンコーダ積算カウンタリセット信号 |
re_rst |
1byte |
ロータリエンコーダ積算カウンタリセットデータ作成モジュール |
2-2 |
||
|
ロータリエンコーダによる位置・姿勢 (x座標) |
re_x |
1byte |
自己位置補正モジュール |
9-1 |
自己位置・姿勢演算モジュール |
2-3 |
|
ロータリエンコーダによる位置・姿勢 (y座標) |
re_y |
1byte |
自己位置補正モジュール |
9-1 |
自己位置・姿勢演算モジュール |
2-3 |
|
ロータリエンコーダによる位置・姿勢 (角度) |
re_th |
1byte |
自己位置補正モジュール |
9-1 |
自己位置・姿勢演算モジュール |
2-3 |
|
超音波センサ距離データ |
uss_dist |
1byte |
超音波センサ計測データ作成モジュール |
3-1 |
||
|
超音波センサ計測データ |
uss_cnt |
1byte |
自己位置補正モジュール |
9-1 |
超音波センサ計測データ作成モジュール |
3-1 |
|
超音波センサ選択データ |
uss_s |
1byte |
超音波センサ制御モジュール |
3-2 |
||
|
超音波センサ前計測データ |
uss_old_cnt |
1byte |
超音波センサ計測データ作成モジュール |
3-1 |
||
|
超音波センサ前選択データ |
uss_old_s |
1byte |
超音波センサ制御モジュール |
3-2 |
||
|
PWM制御データ右 |
pwm_r |
1byte |
PWM制御モジュール |
8-1 |
||
|
PWM制御データ左 |
pwm_l |
1byte |
PWM制御モジュール |
8-1 |
||
|
PWM補正データ右 |
pwm_c_r |
1byte |
軌道補正モジュール |
8-2 |
||
|
PWM補正データ左 |
pwm_c_l |
1byte |
軌道補正モジュール |
8-2 |
||
|
赤外線センサ感知データ |
ir_data |
1byte |
赤外線センサ計測データ作成モジュール |
4-1 |
||
|
赤外線センサ計測データ |
ir_cnt |
1byte |
赤外線センサ計測データ作成モジュール |
4-1 |
||
|
危険フラグ |
d_flag |
1byte |
赤外線センサ計測データ作成モジュール |
4-1 |
||
|
タッチセンサ感知データ |
tch_data |
1byte |
タッチセンサ計測データ作成モジュール |
5-1 |
||
|
タッチセンサ計測データ |
tch_cnt |
1byte |
タッチセンサ計測データ作成モジュール |
5-1 |
||
|
7seg.LED点灯用データ |
disp_7seg |
1byte |
7seg.LED制御モジュール |
6-2 |
7seg.LEDデータ作成モジュール |
6-1 |
|
単色LED点灯データ |
disp_sseg |
1byte |
単色LED制御モジュール |
6-4 |
単色LEDデータ作成モジュール |
6-3 |
|
自己位置補正データ (x座標) |
c_pos_x |
1byte |
自己位置補正モジュール |
9-1 |
||
|
自己位置補正データ (y座標) |
c_pos_y |
1byte |
自己位置補正モジュール |
9-1 |
||
|
自己位置補正データ (角度) |
c_pos_th |
1byte |
自己位置補正モジュール |
9-1 |
||
|
自己位置・姿勢 (x座標) |
self_x |
1byte |
行動計画モジュール 走行用データ作成モジュール 軌道補正モジュール |
7-1 7-2
8-2 |
||
|
自己位置・姿勢 (y座標) |
self_y |
1byte |
行動計画モジュール 走行用データ作成モジュール 軌道補正モジュール |
7-1 7-2
8-2 |
||
|
自己位置・姿勢 (角度) |
self_th |
1byte |
行動計画モジュール 走行用データ作成モジュール 軌道補正モジュール |
7-1 7-2
8-2 |
||
|
過去の自己位置 (x座標) |
old_s_pos_x |
1byte |
走行用データ作成モジュール |
7-2 |
||
|
過去の自己位置 (y座標) |
old_s_pos_y |
1byte |
走行用データ作成モジュール |
7-2 |
||
|
過去の自己位置 (角度) |
old_s_pos_th |
1byte |
2828走行用データ作成モジュール |
7-2 |
||
|
速度データ |
self_v |
1byte |
行動計画モジュール 走行用データ作成モジュール |
7-1 7-2 |
||
|
走行モード |
run_mode |
1byte |
行動計画モジュール 走行用データ作成モジュール |
7-1 7-2 |
||
|
競技モード |
mode |
1byte |
行動計画モジュール 走行用データ作成モジュール |
7-1 7-2 |
初期設定モジュール |
1-1 |
|
相手位置 (x座標) |
m_pos_x |
1byte |
行動計画モジュール |
7-1 |
||
|
相手位置 (y座標) |
m_pos_y |
1byte |
行動計画モジュール |
7-1 |