|
| Fig.1 |
 |
| Fig.2 |
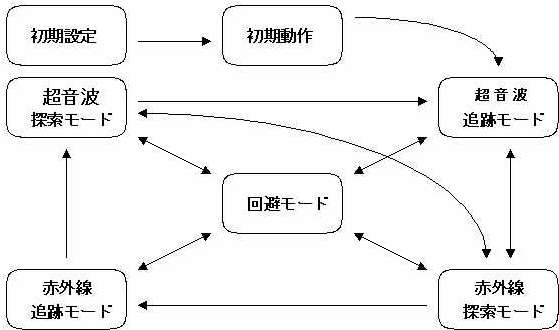
スタートしてから一定時間超音波を出して待機する。相手が動いたら超音波モードに移る。もし動かなかったら前進していく。
相手を見失ったら、そのまま直進し、壁30cm手前まで進む。次に90°回転し、競技場の角まで進む。競技場の対角に進行方向を向け、そのまま前進しながら、超音波センサを使い相手機を探す。
相手を発見したら、相手の方向を向き、30-50cmすすむ。それからその場で超音波センサを使い、相手の位置を確認する。
相手の正面30cm以内に入り、相手が動かなかったら、自機を45°回転し、相手の真横まで進む。そこで相手のいた方向に正面を向ける。相手がまだ正面にいたら、もう一度同じ動作をする。相手が正面にいなっかたら、その場でセンサにかかるまで待機している。
回避モードは、次のように場合わけして示す。
赤外線センサで追跡しているときは、相手がかなり近くにいると考えられる。このとき、相手を見失うと、相手に自分の勝敗判定装置の位置を見つけられてしまう可能性も大きい。これを防ぐために、相手を見失ったら50cm程度前進してから、体勢を立て直す。前進して、壁や相手に接触した場合は、回避モード2に移る。
タッチセンサで接触を確認したら、いったん停止して赤外線センサで相手が後を向いていないか確かめる。反応したら、そのまま追跡を続ける。反応しなかったとき、次のような回避を行う。タッチセンサの右にだけ接触していたなら、左に90度回転し、左に接触していたなら、右に回転する。左右両方に接触していたなら、右に90度回転する。その後、50cm前進し、体勢を立て直す。