二足歩行のロボット開発 その2
二足歩行ロボットの開発 その1で説明したように静歩行での歩行が可能なロボットを製作しました。
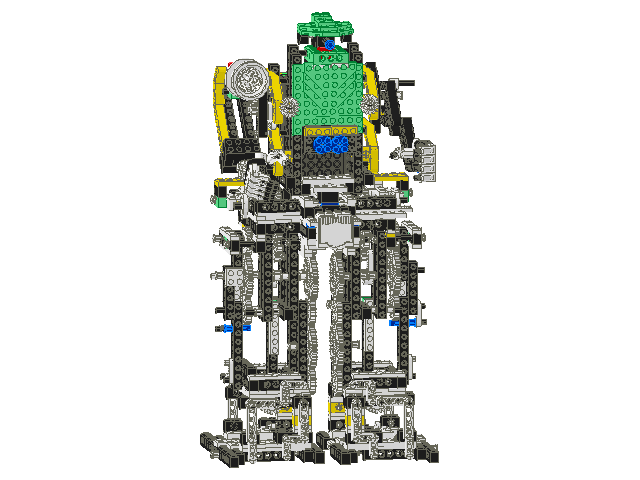
以下のCAD図がそれになります。
製作した二足歩行ロボットの図
それでは、このロボットの製作図を以下にリンクします。
ここでは、MLCADで設計図を二足歩行ロボットの足、腕、頭等パーツごとに作成しましたが、
CADで表せないパーツなども、含まれていますので最終的には実際ロボットの画像を参考にしてみてください。
二足歩行ロボット設計図リンク
注意
顔部と腕部に装着された赤い物体はマイクロモーターといって、別売りでRISには付属しません。
マイクロモーターとは、その名の通りとても小型なモーターであり、付属の9Vモーターの1/4程度の大きさしかありません。
そのため、場所を取らずに動力を得れるのでそれ程トルクを必要としない個所の動力源としては最適です。
この二足歩行ロボットでは、肩のガトリング砲とモノアイを動作させるだけのギミックとして使っているだけなので、マイクロモーターが
無くても、なんら支障はありません。マイクロモーターの紹介までに装着しました。